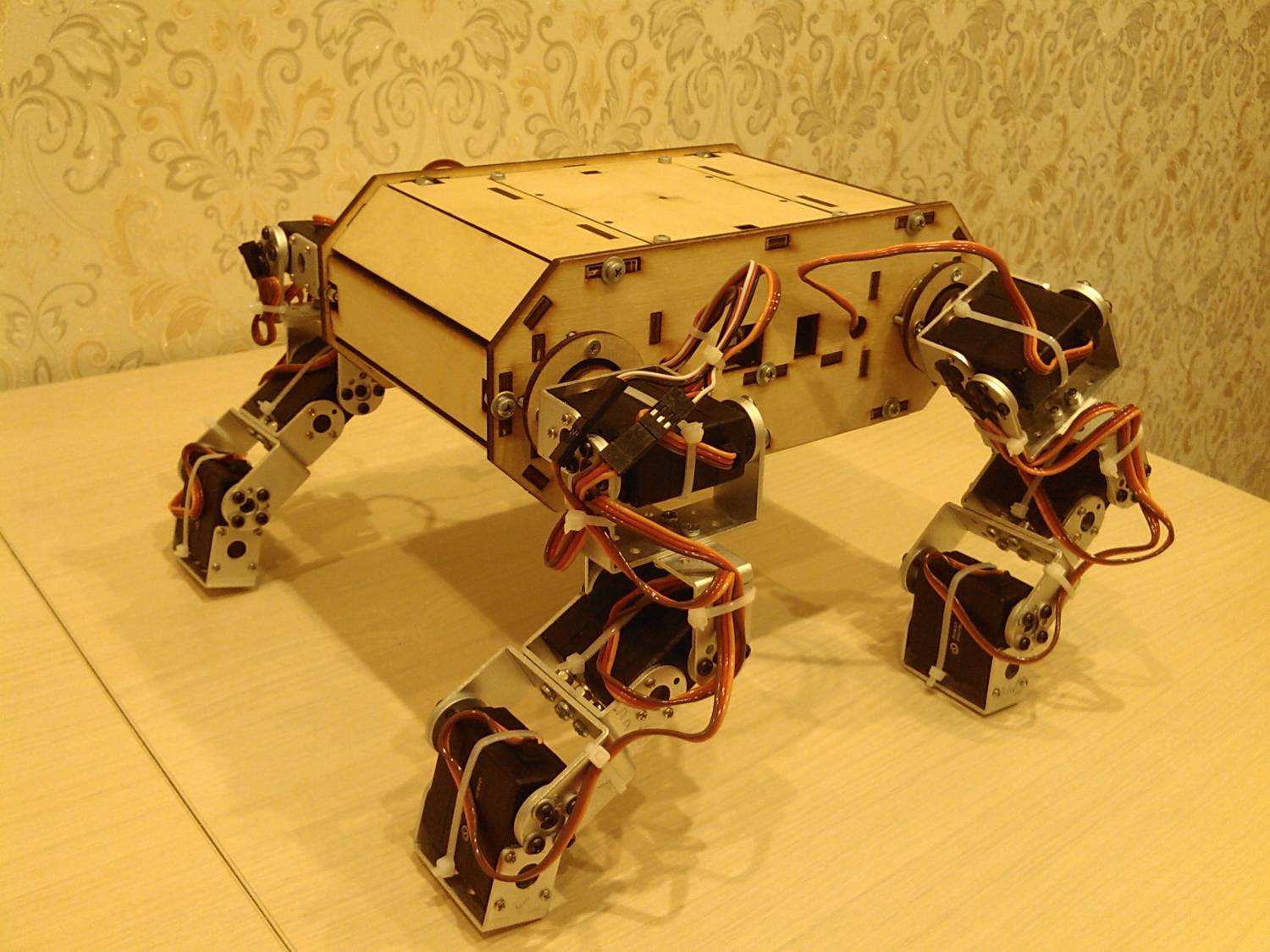
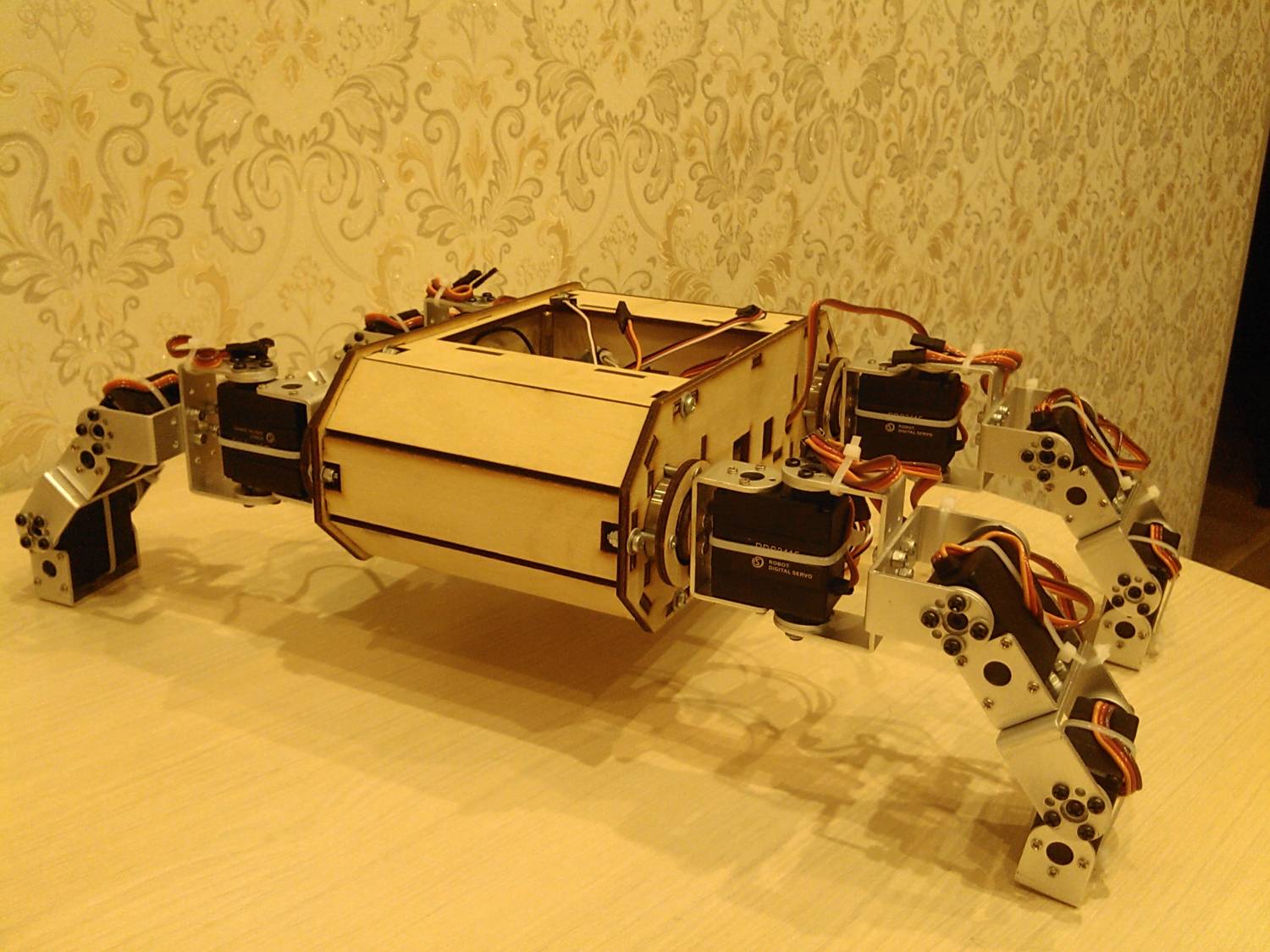
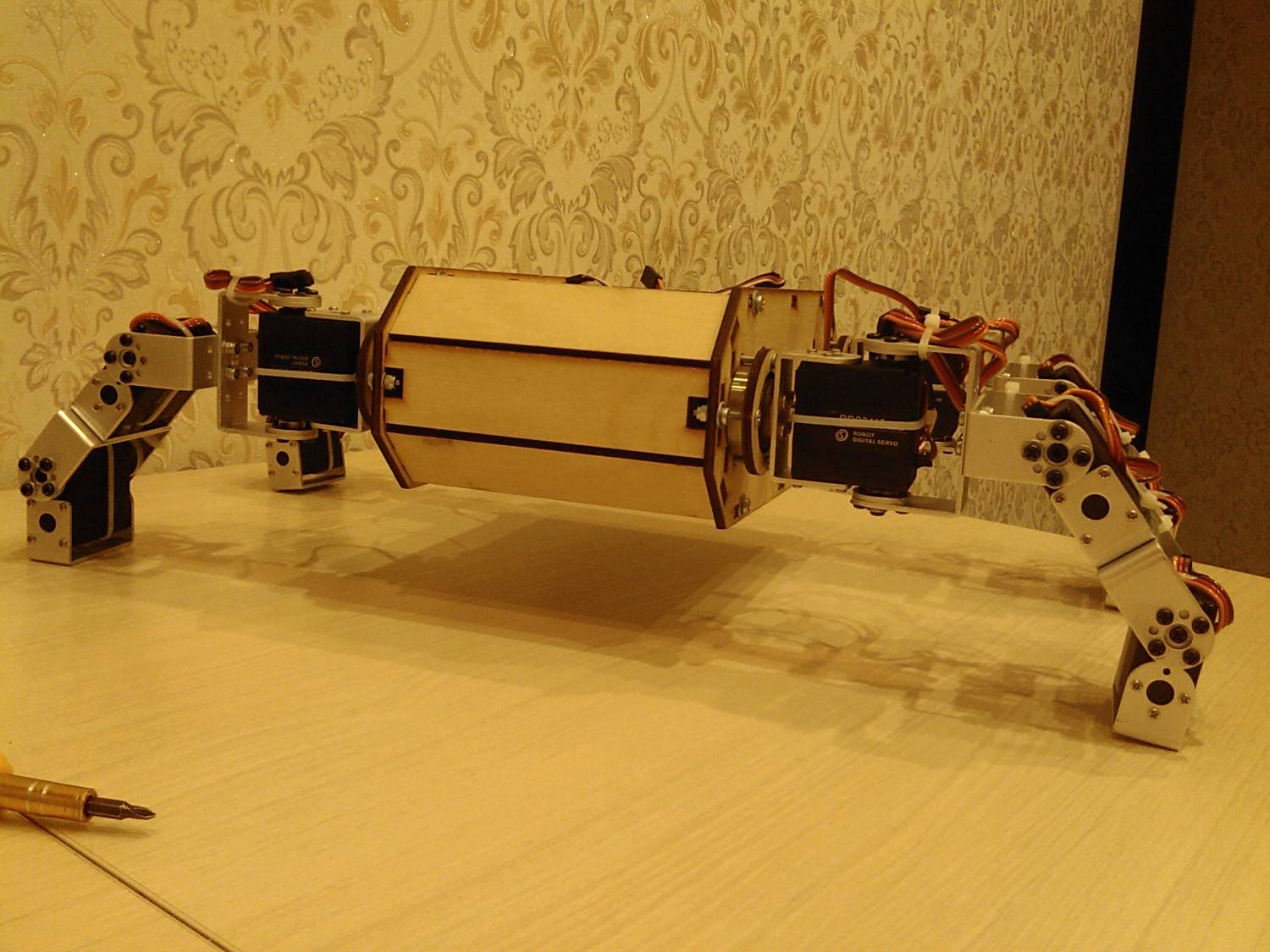
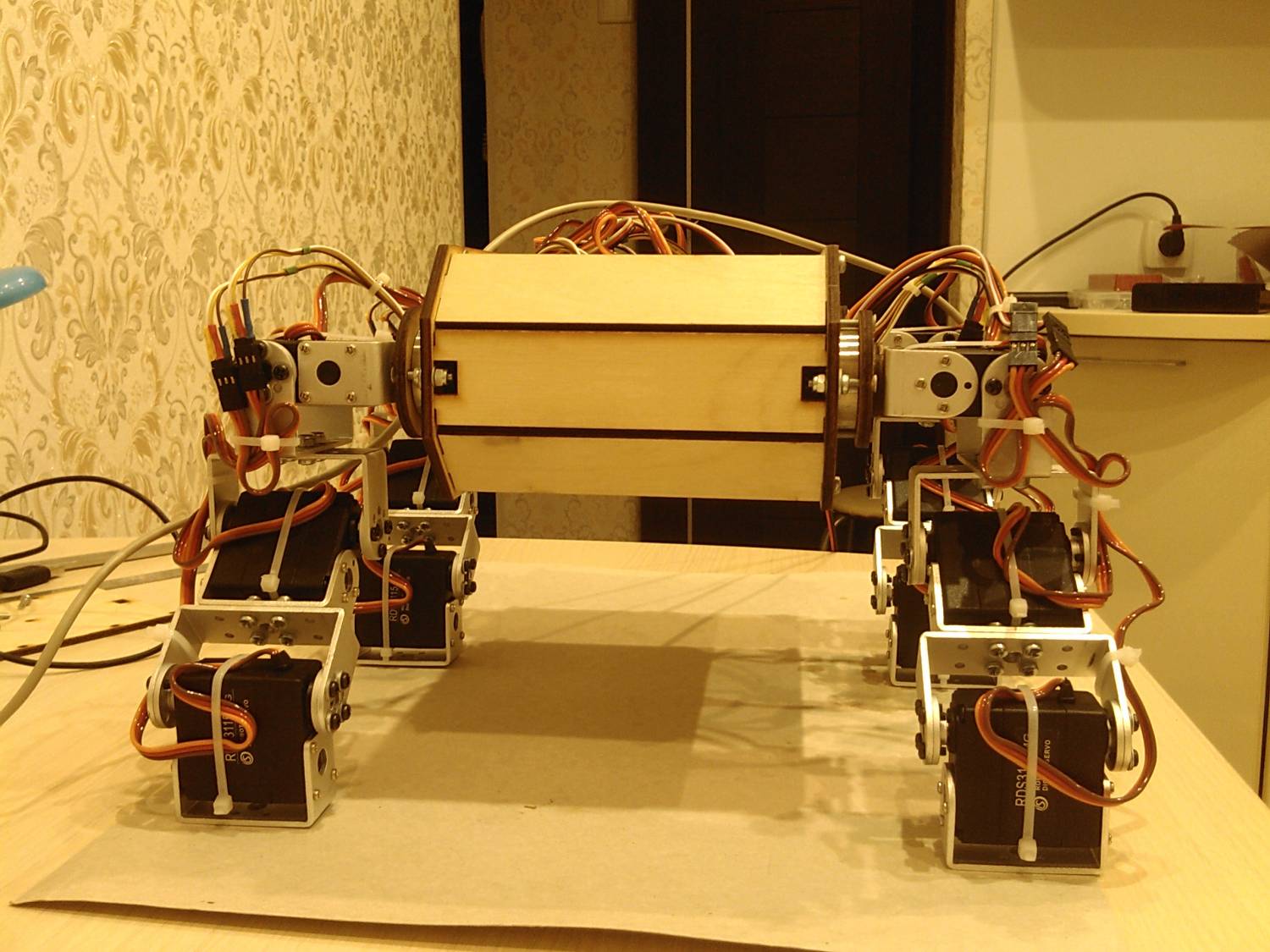
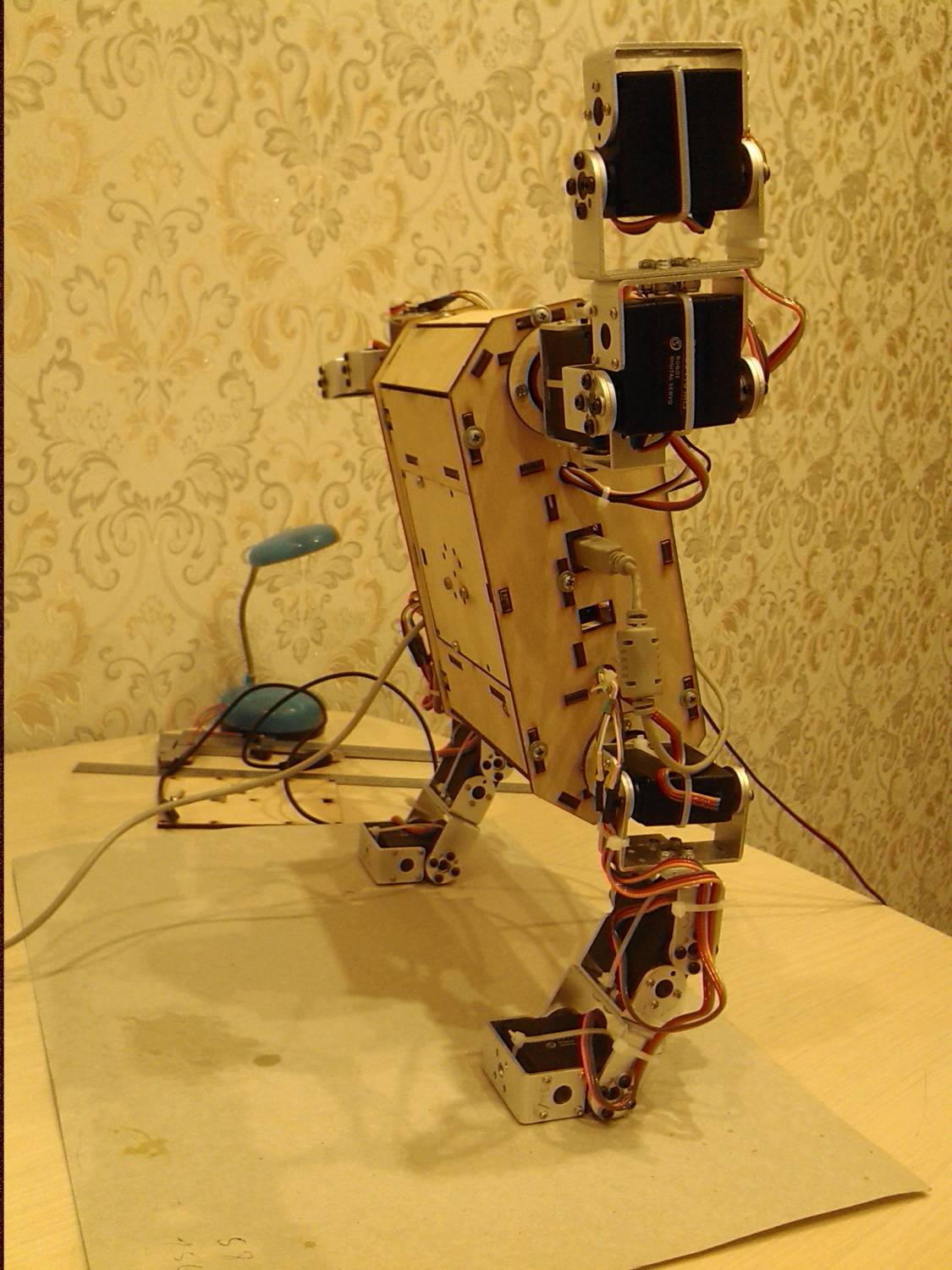
Вот так возможно будет выглядеть трансформация лап. Робот сможет перемещаться как паук. Без движения робот даже с одной поднятой лапой стоит устойчиво (питание не подключено).
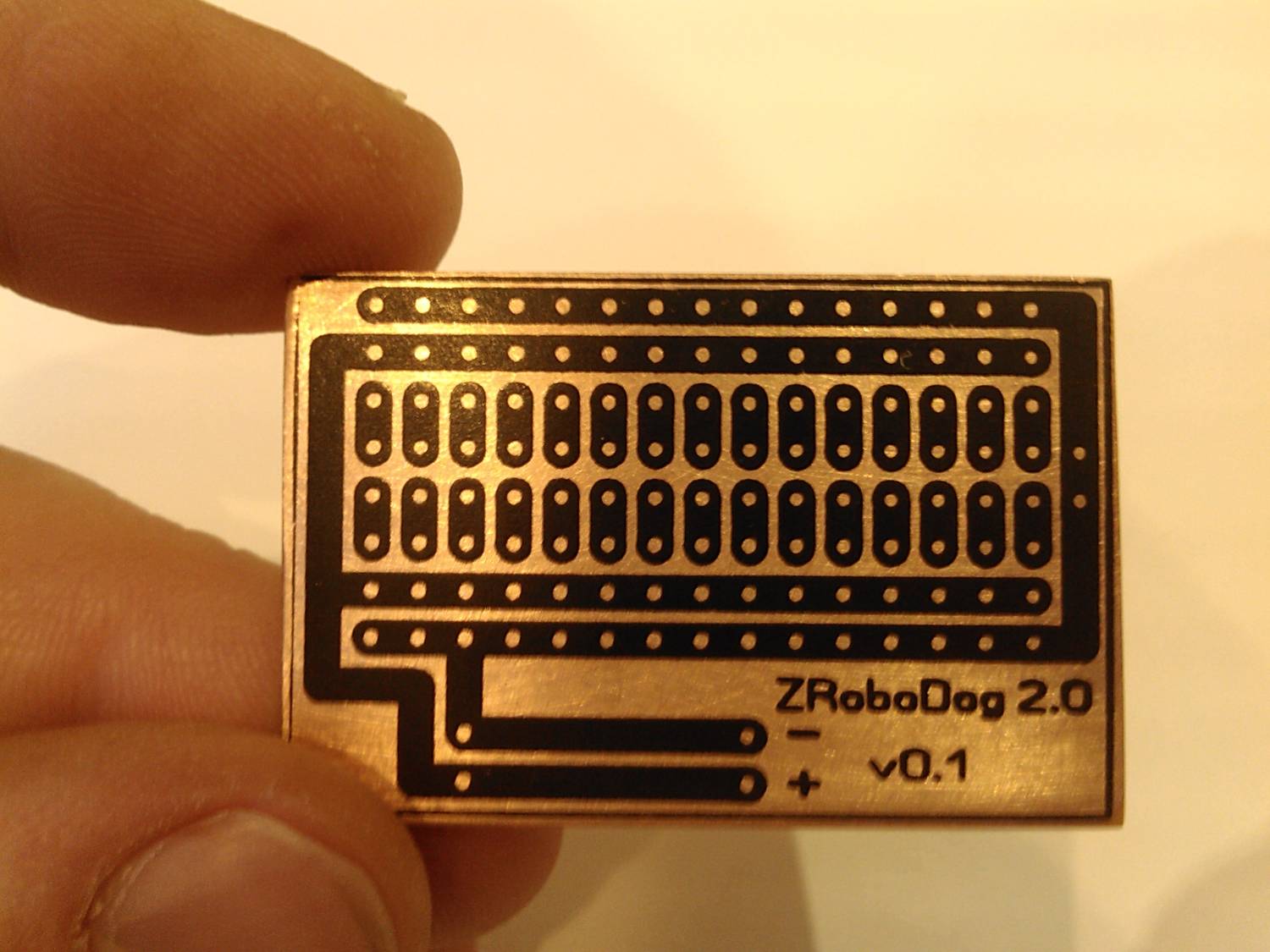
Сделал небольшой шилд для удобного подключения серво и разводки питания к ним. Но лучше было бы на макетной плате спаять. Отверстия насверлил не очень ровно, замучился гребенки вставлять.
Подключил все сервы и питание к ним, покрутил каждую серву через программу ServoController. На лапах стоит устойчиво, даже если одна лапа висит в воздухе. Сейчас осталась самая сложная часть - научить ходить. Надеюсь у меня получится. На фото питание серво подключено, вес держат легко.