






Ищите меня тут
![]()
![]()
![]()
![]()
Мы на Android


Последние записи
Записи на форуме
Случайная картинка

Случайное видео
Статистика
Онлайн всего: 1
Гостей: 1
Пользователей: 0
Главная » 2014 Октябрь 11 » R-Frame Mini двухколесный управляемый робот
|
R-Frame Mini двухколесный управляемый робот
Проекты | 11.10.2014 в 23:48 | от: ZSeregaA | Просмотров:
 35746 |
Комментариев: 35746 |
Комментариев:  0 |
Рейтинг: 0 |
Рейтинг:  4.7 / 3 4.7 / 3
|
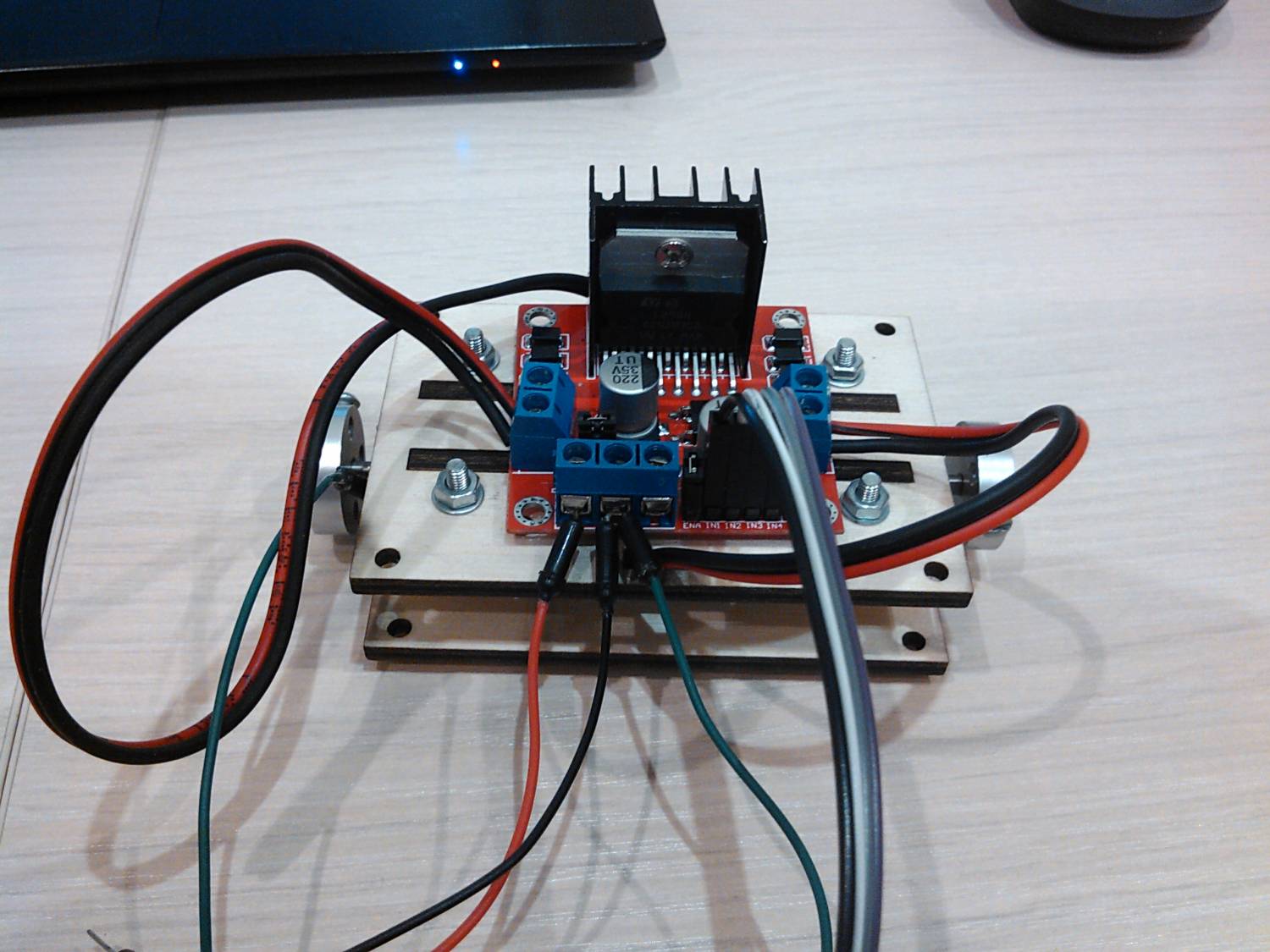
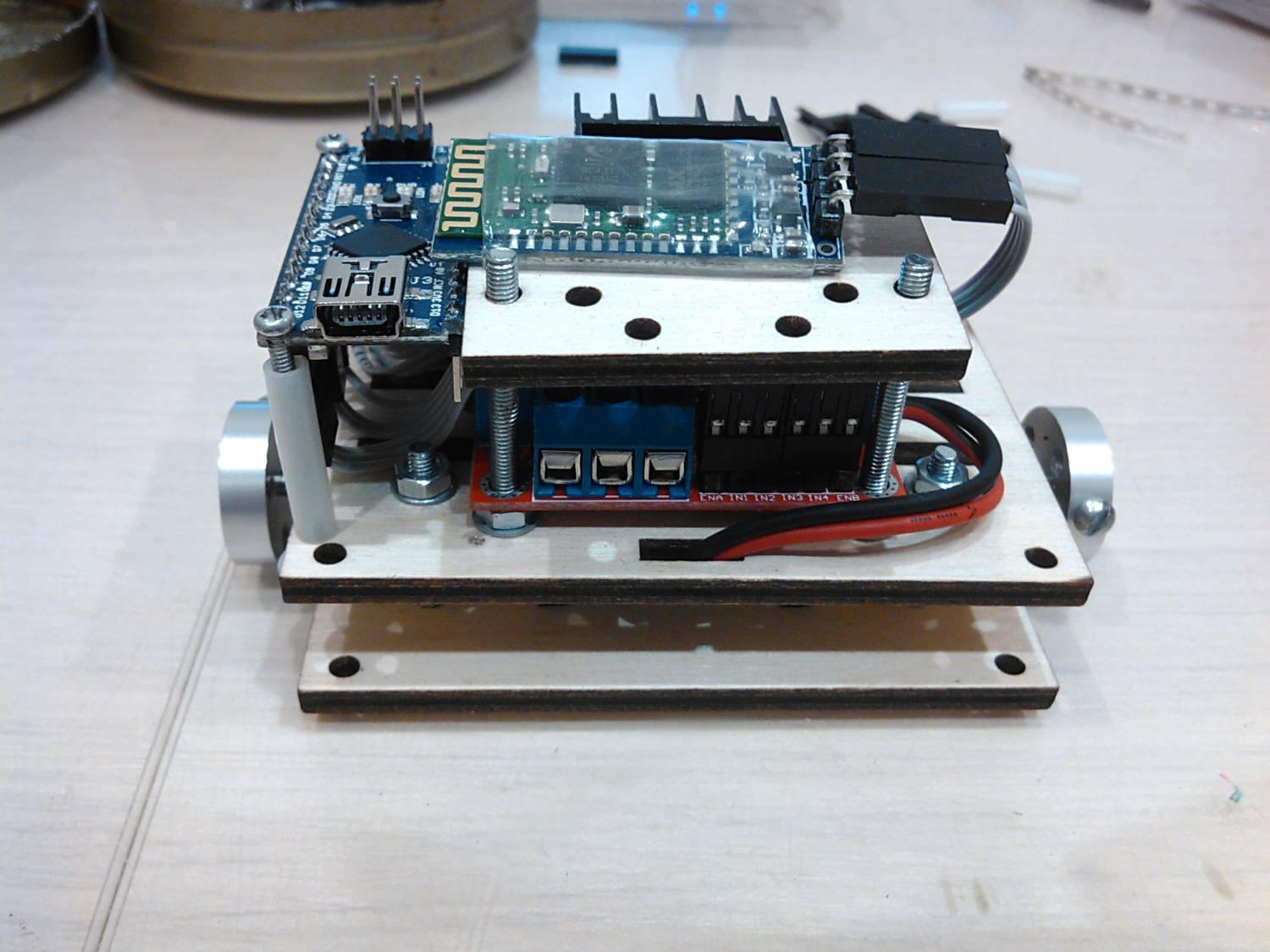
Первый раз увидев Sphero Ollie, я решил сделать свою версию. Начертил чертеж, собрал простейшую 3D модель для наглядности, размеры робота получались не маленькими. Купил Arduino Nano и моторшилд на L298N, начертил чертеж и собрал уже реальную модель. В связи с уменьшением размеров, изменил название на R-Frame Mini. В этом роботе использовал маленькие, но мощные для данной модели мотор-редукторы.
 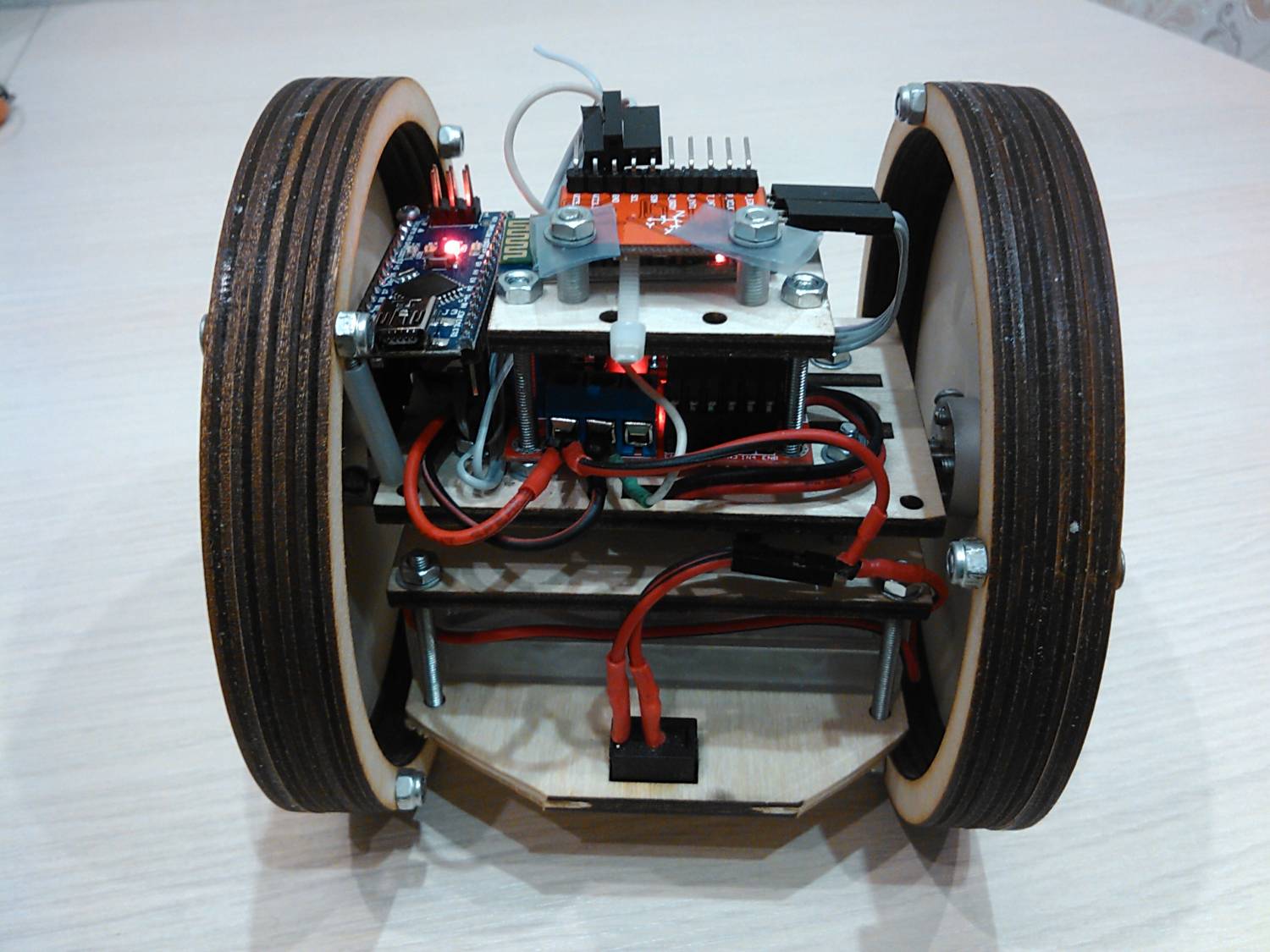
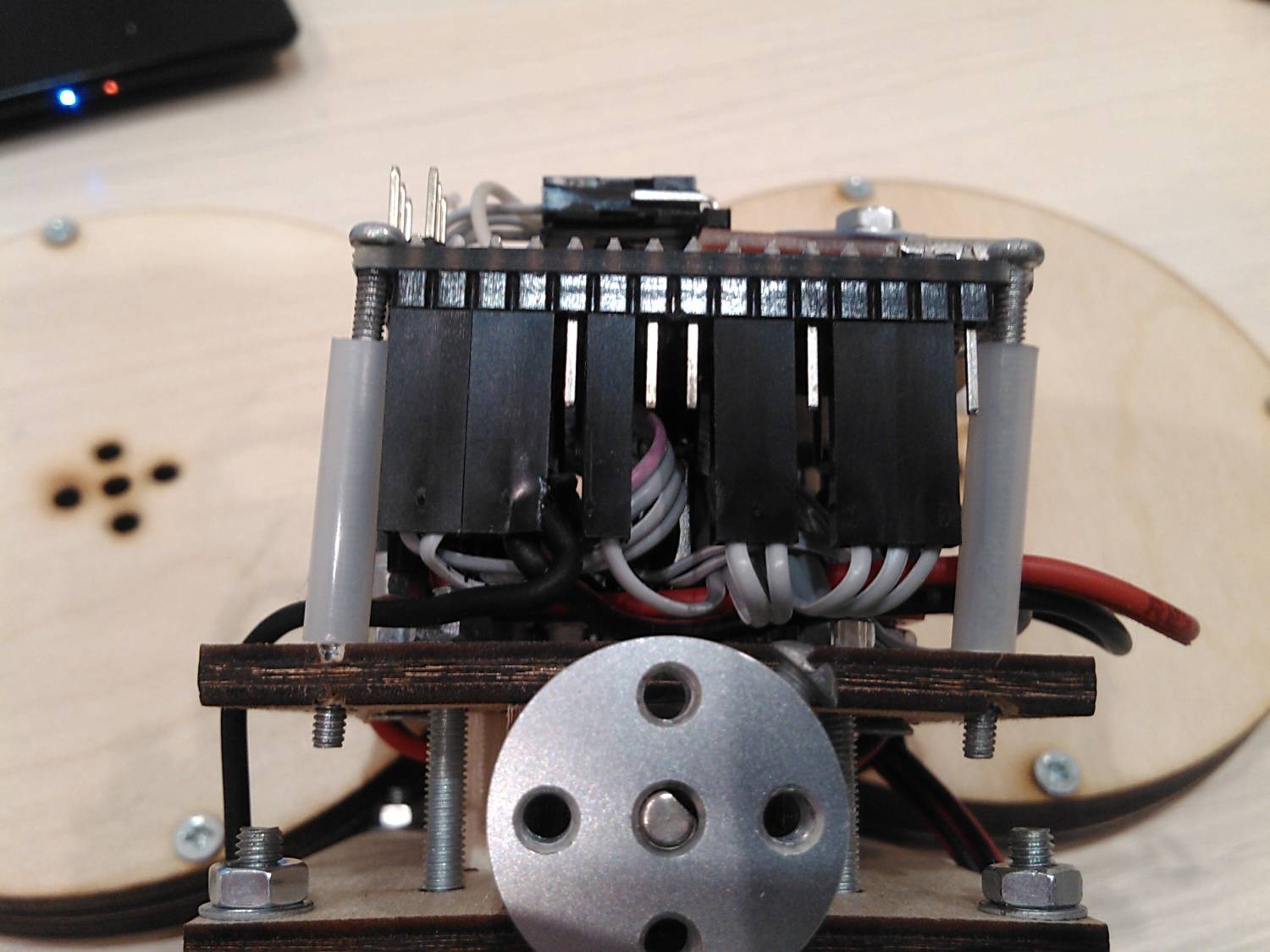 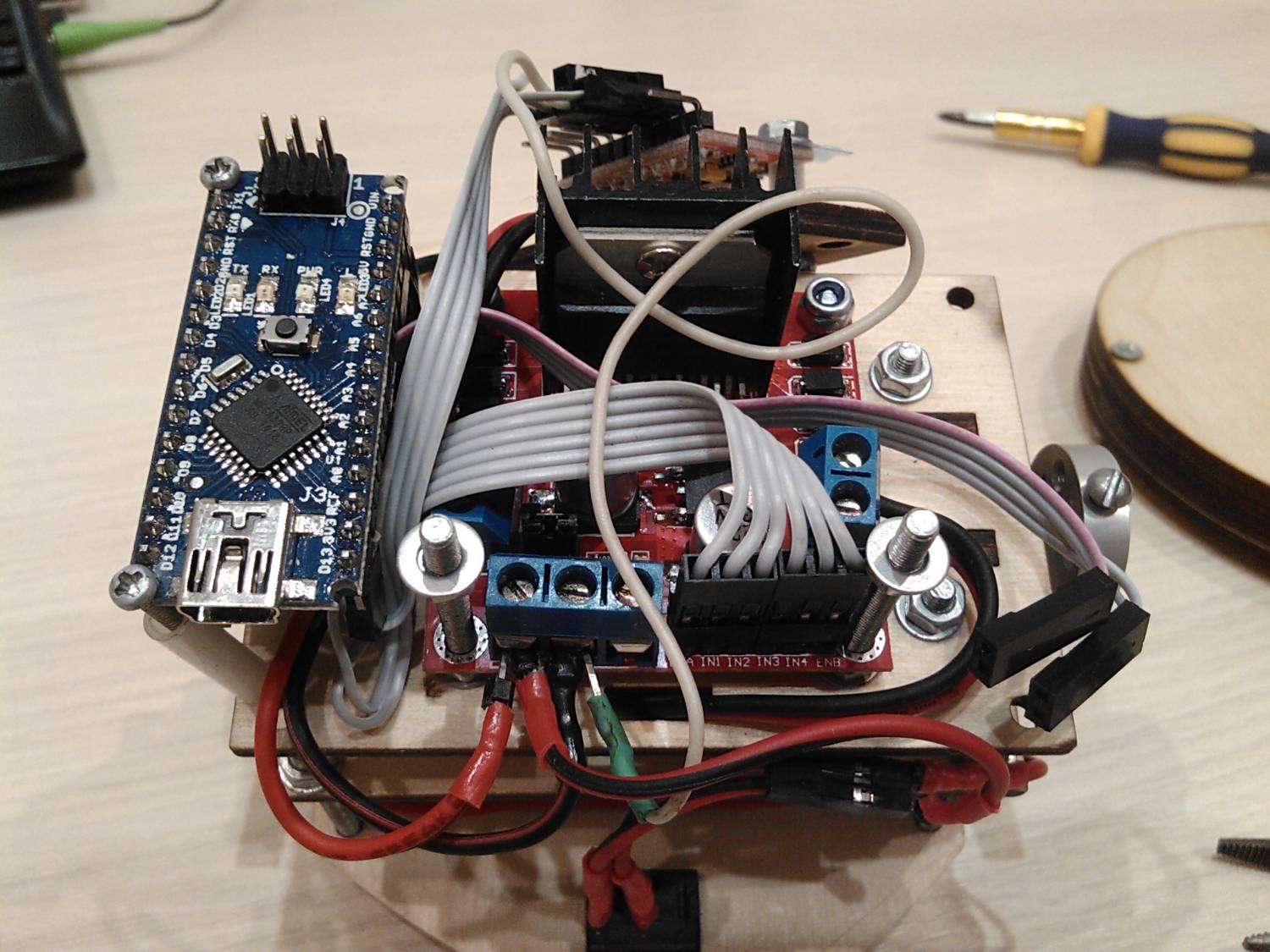 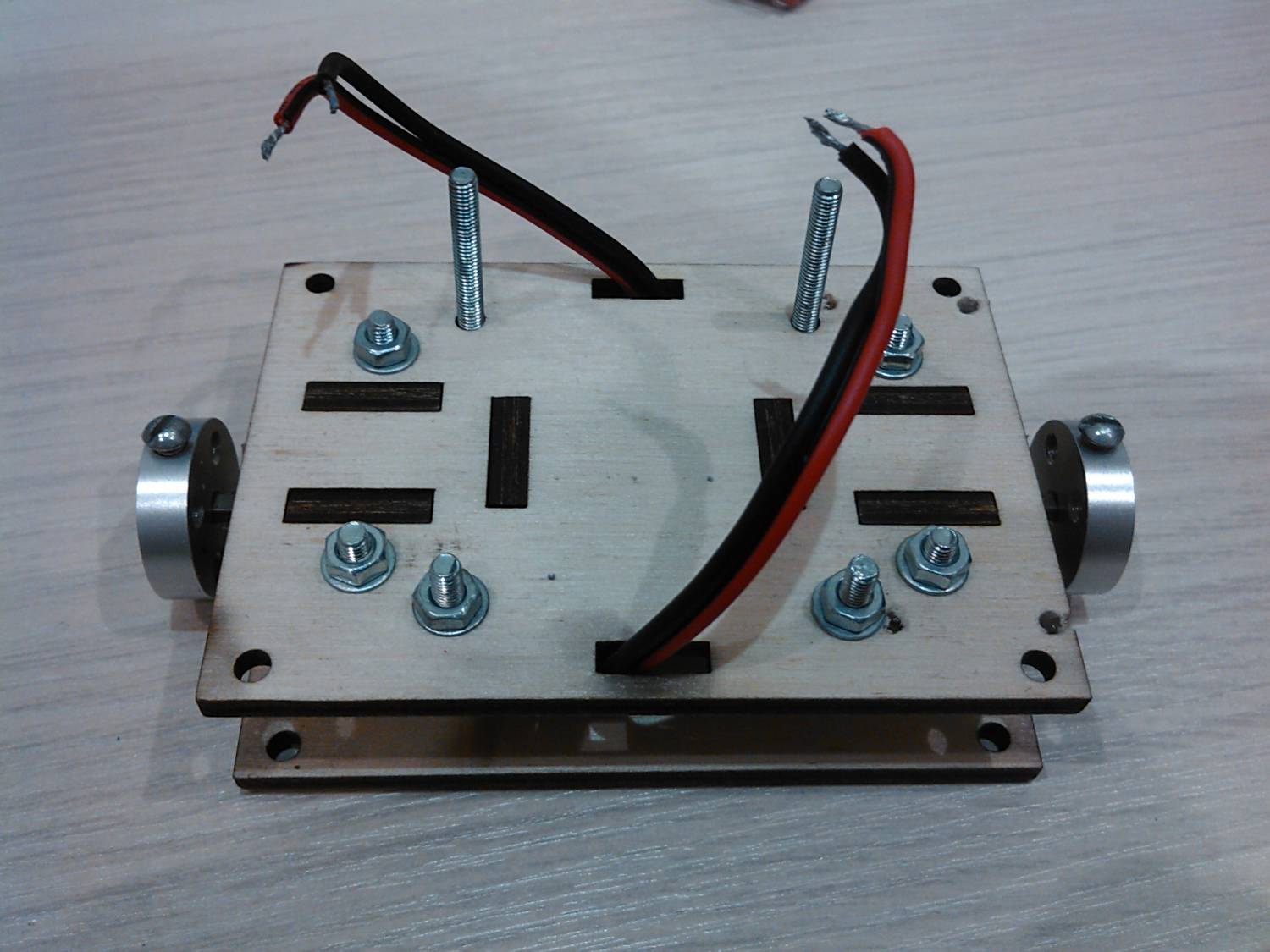 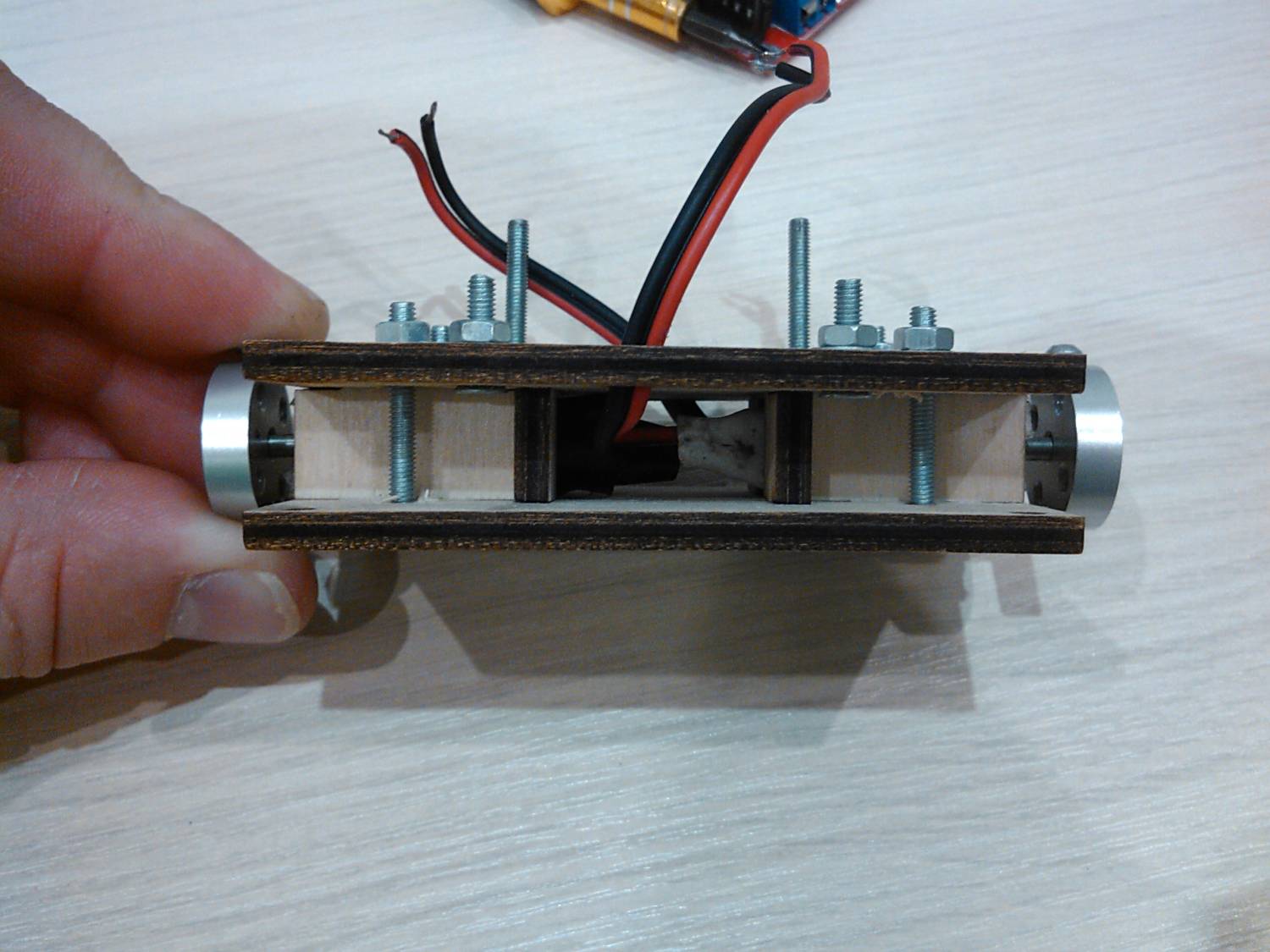
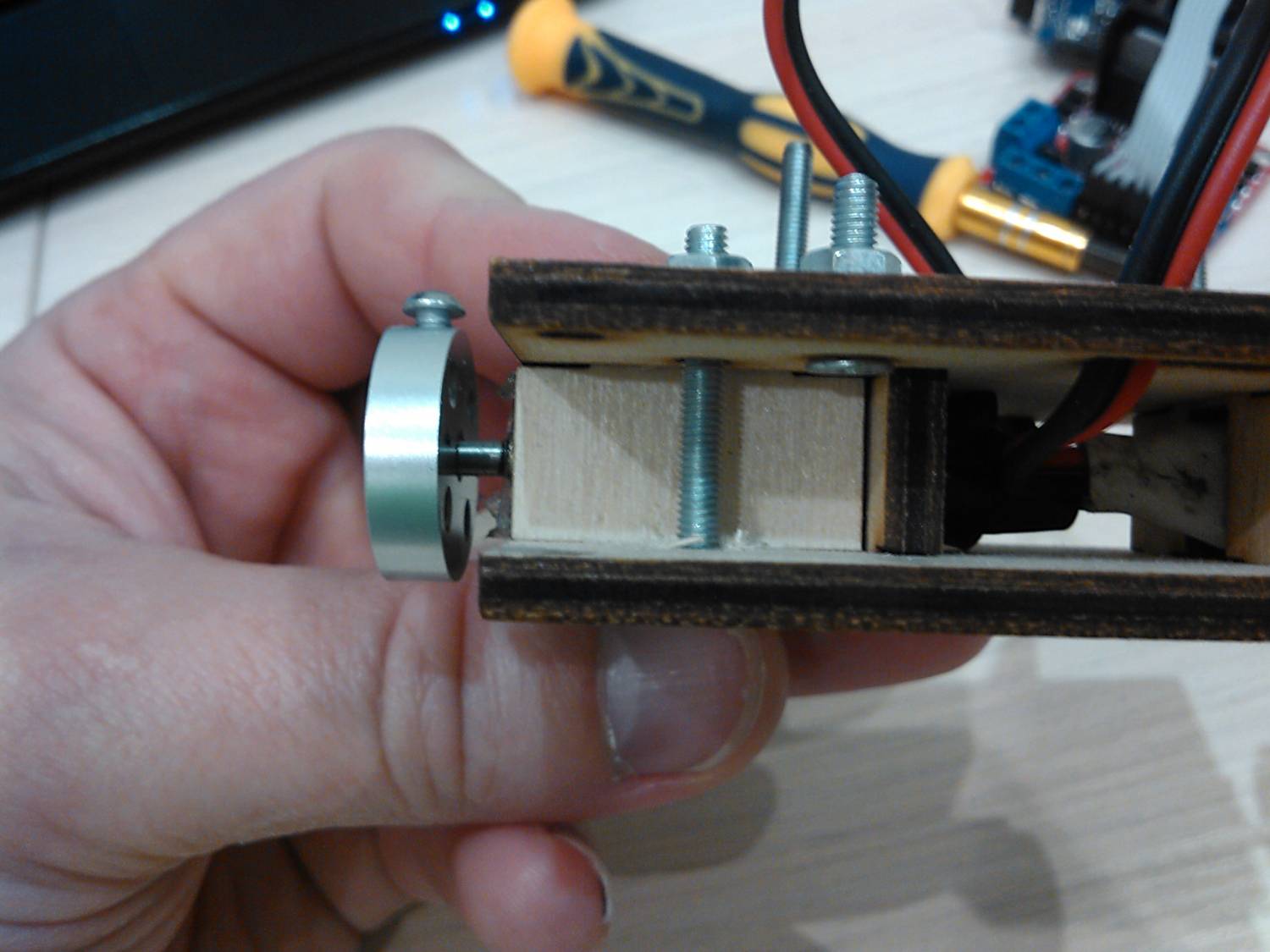 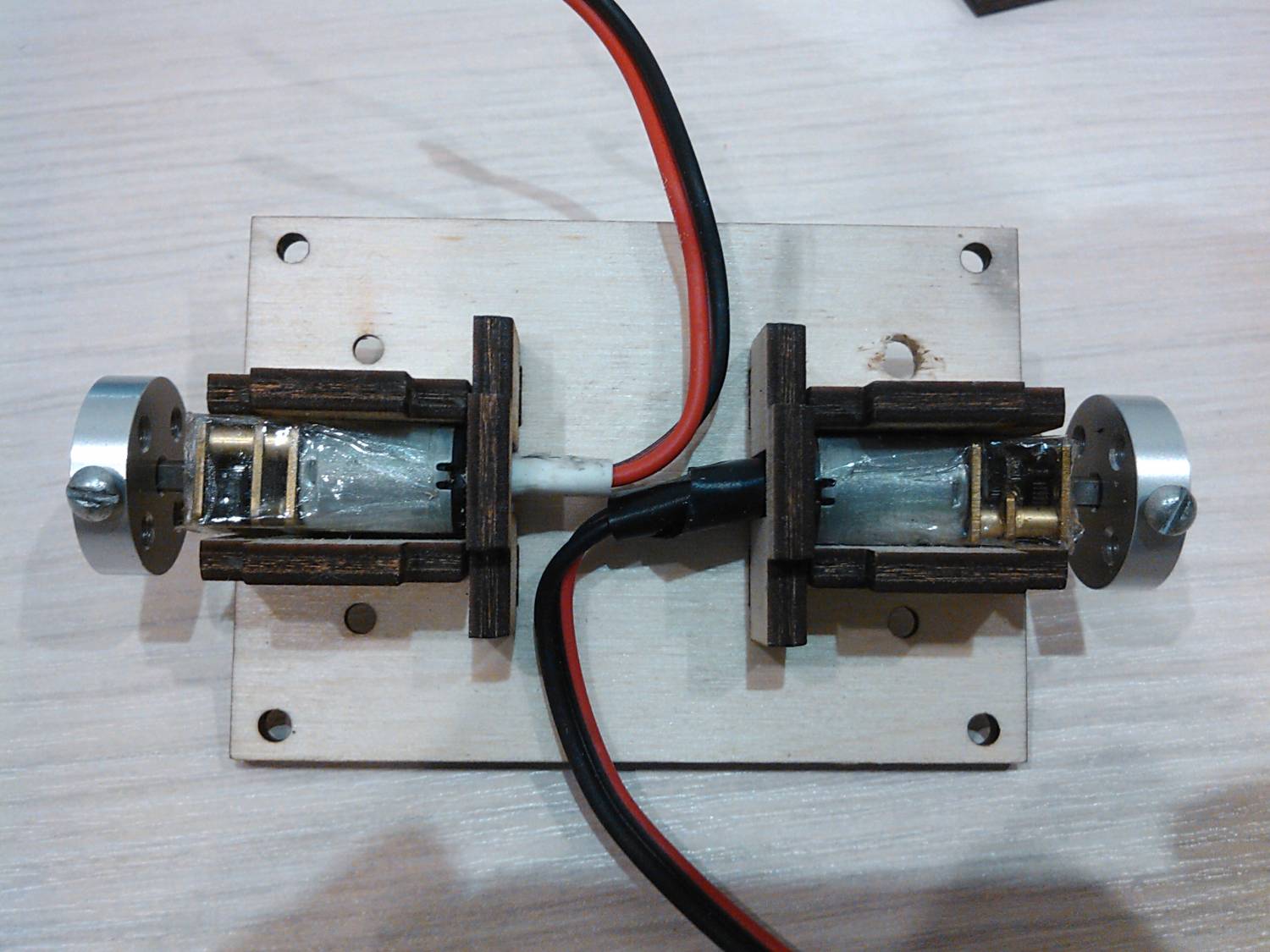 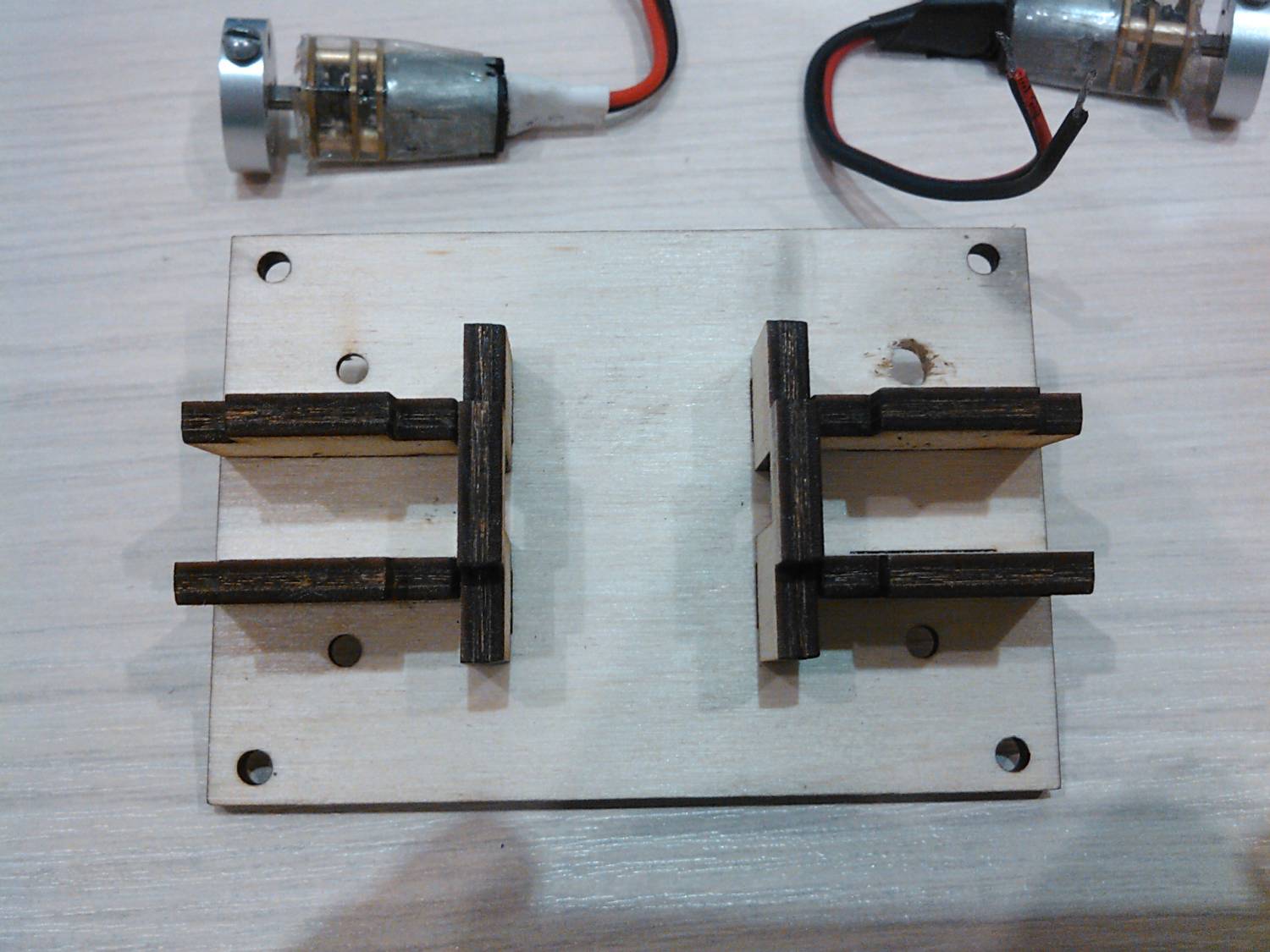 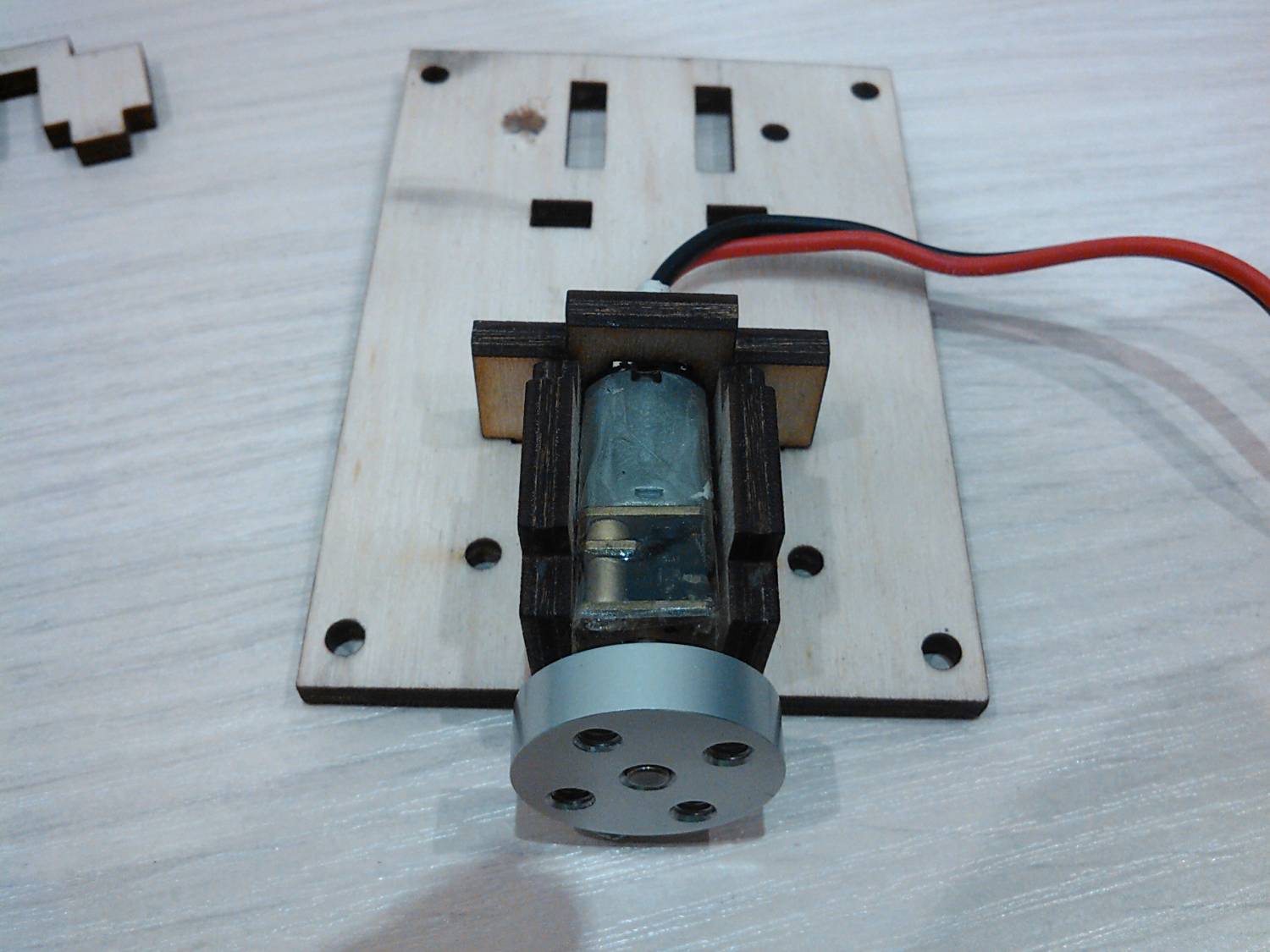
   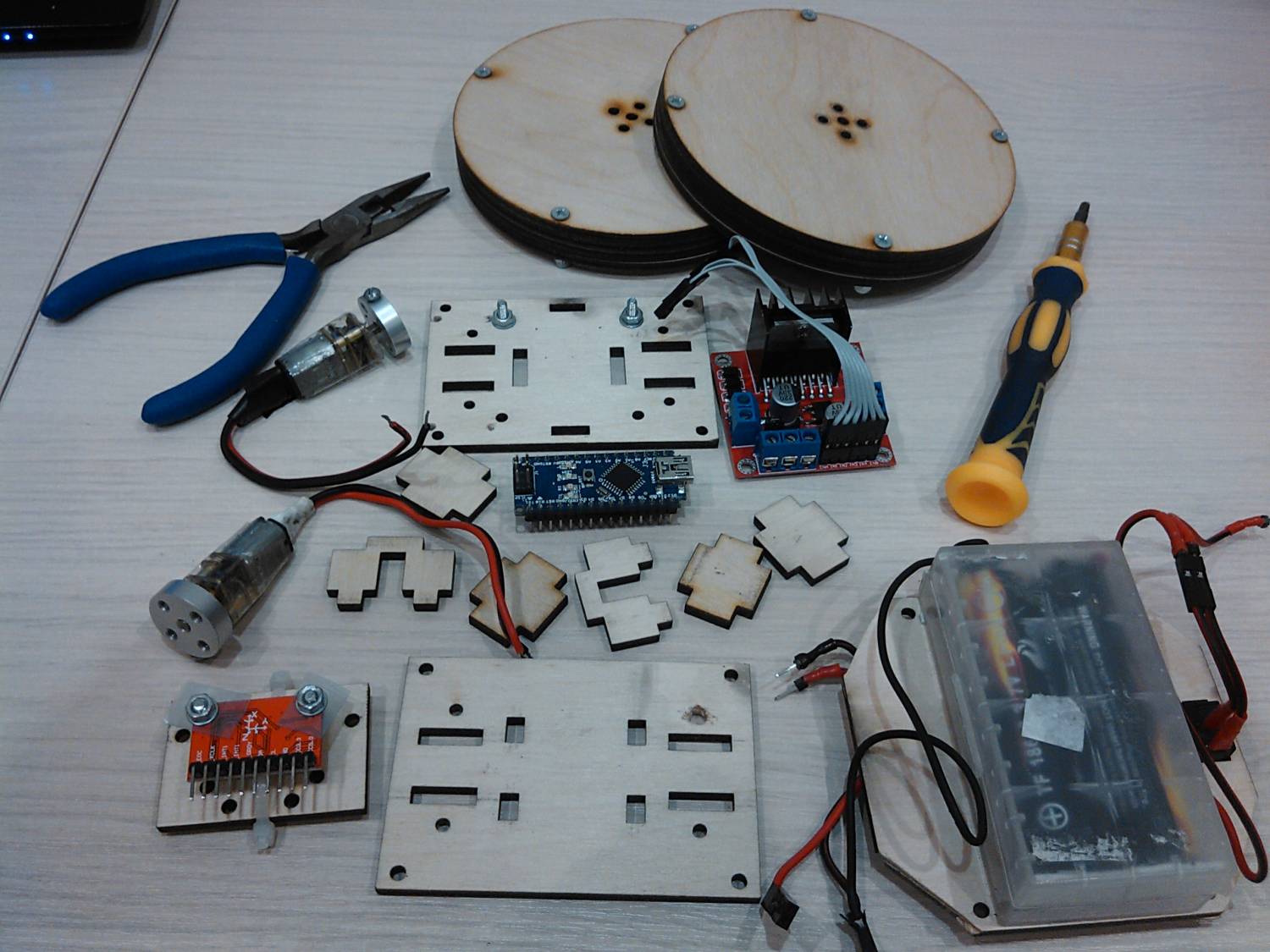 К сожалению, эти редукторы не выдержали нагрузки и один из редукторов заклинило. До этого момента я написал программу управления с более плавным стартом и остановкой. Но видео снять не успел, во время тестов случилась поломка. Вот как работал мой алгоритм старта. Скорость набиралась плавно. Но даже это не спасало от проворачивания внутренней части. Для решения этой проблемы на робота был установлен 10DOF модуль. Если при старте или во время движения внутренняя часть проворачивалась более заданного угла, скорость моторов снижалась до минимальной. При этой минимальной скорости, моторы не могли сдвинутся с места без посторонней помощи. Внутренняя часть (по инерции) возвращалась в рабочие приделы. Как только внутренняя часть проходила заданный угол, на моторы вновь подавалась рабочая скорость с плавным возрастанием. Таким образом, робот продолжал движение плавно набирая скорость. На видео используется другой алгоритм, по этому движения дерганые. Но как остановить разогнавшегося двухколесного робота? Если перестать подавать ШИМ, он просто катится по инерции. Если тормозит противоходом, внутренняя часть прокручивается и робот катится в том же направлении. Немного поэкспериментировав, решил использовать систему как у балансирующих роботов. Опыта в этом не было, но как не странно, у меня получилось сделать это самому. Представьте, что двухколесный робот разогнался и были отпущены кнопки управления, ШИМ на моторы не подавался. Так как моторы были мощными, они вставали намертво, их и руками с трудом можно провернуть. Робот катился по инерции, при этом, его внутренняя часть крутилась вместе с колесами. Смотрите видео, на нем видно как работает моя балансировка. Управление роботом осуществлялось по блютуз через приложение RemoteXY (http://remotexy.com/ru/). Приложение очень удобное и гибкое, советую. В связи с поломкой, работу над этим роботом решил остановить. Алгоритм управления и балансировки так и не доведен до стабильной работы. Сейчас занимаюсь реализацией других идей. Файлы проекта: R-Frame_Mini.zip Это может быть вам интересно: |
| Всего комментариев: 0 | |