|
SBRover Bot
|
|
| ZSeregaA | Дата: Понедельник, 20.10.2014, 00:39 | Сообщение # 1 |
 Лейтенант
Группа: Администраторы
Сообщений: 61
Репутация: 2
Статус: Offline
| SBRover Bot (Smart Balancing Rover Bot - Ровер Бот с Умной балансировкой) 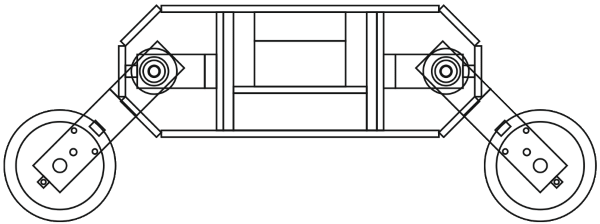
Что это будет: Это будет робот (машинка) на четырех колесах, который при передвижении по неровной поверхности сможет удерживать корпус в горизонтальном положении. Каждое колесо с мотор-редуктором будут крепится к валу сервопривода. Сервопривод буде поднимать и опускать колесо. Ориентируясь по IMU датчику, робот будет опускать или поднимать каждое колесо, тем самым поддерживая корпус в горизонтальном положении. Робот сможет амортизировать падения с небольшой высоты. Для этого будет использоваться определение касания поверхности. При опрокидывании, робот производит инверсию положения колес и сможет продолжить движение. Робот сможет преодолевать препятствия не выше максимального клиренса (пока при ручном управлении). Роботом можно будет управлять по блютуз с андроид устройства. И ещё...
В этой теме буду делится прогрессом. Идеи и критика приветствуется.
|
| |
| |
| ZSeregaA | Дата: Четверг, 23.10.2014, 01:17 | Сообщение # 2 |
|
Лейтенант
Группа: Администраторы
Сообщений: 61
Репутация: 2
Статус: Offline
| Для удобства, крепления мотор-редукторов с колесами, буду называть лапами.
Собрать саму модель думаю не составит труда, а вот с написанием правильного кода могут возникнуть трудности. В первую очередь это связано с отсутствием знаний и навыков в программировании. Скорей всего всё легко считается, буду искать подходящую информацию.
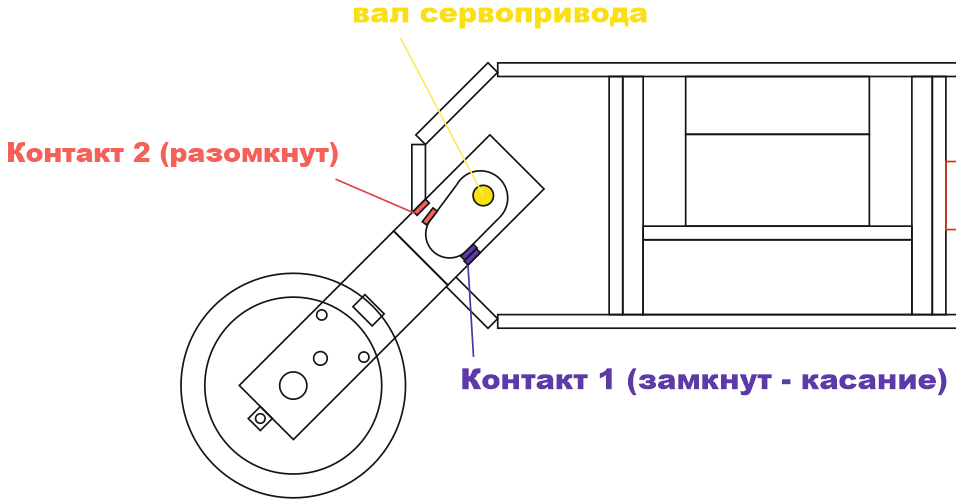
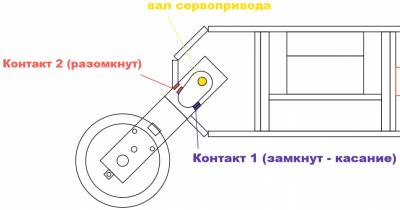
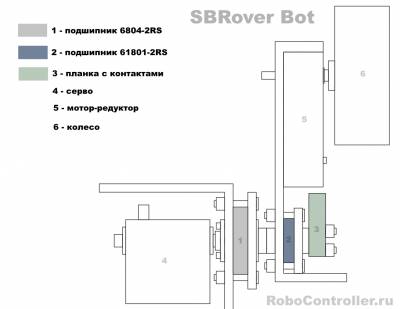
Я упоминал «определение касания поверхности». Это будут простые контакты расположенные в лапах. Два разных контакта в одной лапе, 1 нижний (учитывает касается ли лапа поверхности), 2 верхний (аналог первого для перевернутого положения робота). Если робота поднять, то контакты 1 разомкнутся. Если робота перевернуть, то будет учитываться контакт 2. Уже на практике посмотрю можно ли учитывать срабатывания контактов при столкновении с препятствием. Например, робот едет вперед, натыкается на высокое препятствие передней парой лап, моторы толкают робота вперед. В связи с чем, нижние контакты должны разомкнутся. Всё это будет зависеть от текущего клиренса.
|
| |
| |
| ZSeregaA | Дата: Пятница, 31.10.2014, 00:27 | Сообщение # 3 |
|
Лейтенант
Группа: Администраторы
Сообщений: 61
Репутация: 2
Статус: Offline
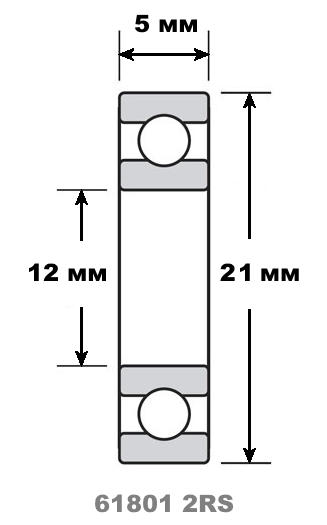
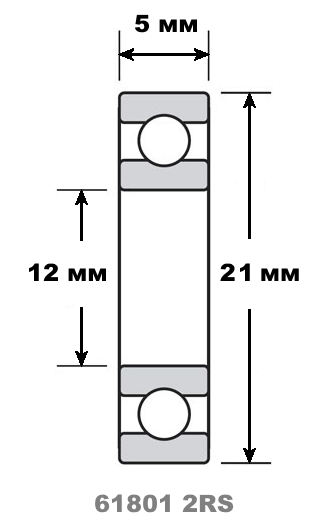
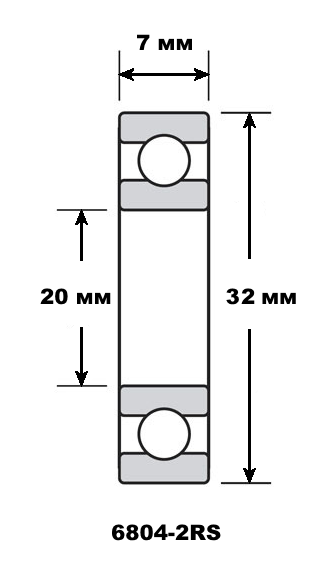
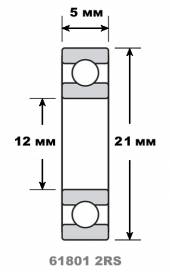
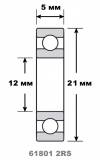
| Планирую использовать польские подшипники 61801 2RS. В этих подшипниках будет проходить вал идущий от серво к лапам.
|
| |
| |
| zaratustra | Дата: Суббота, 01.11.2014, 18:32 | Сообщение # 4 |
 Рядовой
Группа: Пользователи
Сообщений: 12
Репутация: 0
Статус: Offline
| Интересно так то. Начал делать что нибудь? Запчасти купил?
|
| |
| |
| ZSeregaA | Дата: Суббота, 01.11.2014, 18:42 | Сообщение # 5 |
|
Лейтенант
Группа: Администраторы
Сообщений: 61
Репутация: 2
Статус: Offline
| Цитата zaratustra (  ) Интересно так то. Начал делать что нибудь? Запчасти купил?
Есть почти всё кроме корпуса. Мало свободного времени, корпус нужно ещё дочертить, начну на днях.
|
| |
| |
| ZSeregaA | Дата: Понедельник, 03.11.2014, 00:35 | Сообщение # 6 |
|
Лейтенант
Группа: Администраторы
Сообщений: 61
Репутация: 2
Статус: Offline
| Вот что планирую использовать в SBRover Bot:
* Arduino Mega 2560 R3
* Arduino Motor Shield R3
* Сервы RDS3115
* UBEC 3A 5V 6V (для питания сервоприводов)
* Bluetooth HC-06
* 4 мотор-редуктора с колесами
|
| |
| |
| ZSeregaA | Дата: Вторник, 04.11.2014, 21:19 | Сообщение # 7 |
|
Лейтенант
Группа: Администраторы
Сообщений: 61
Репутация: 2
Статус: Offline
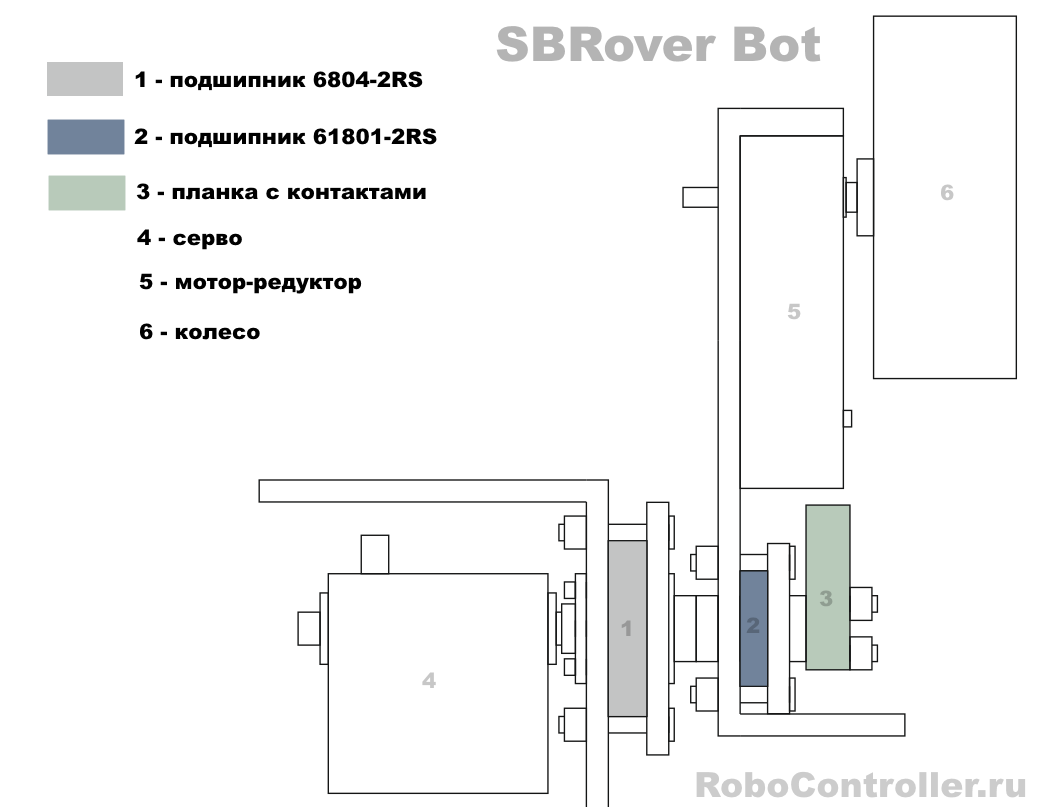
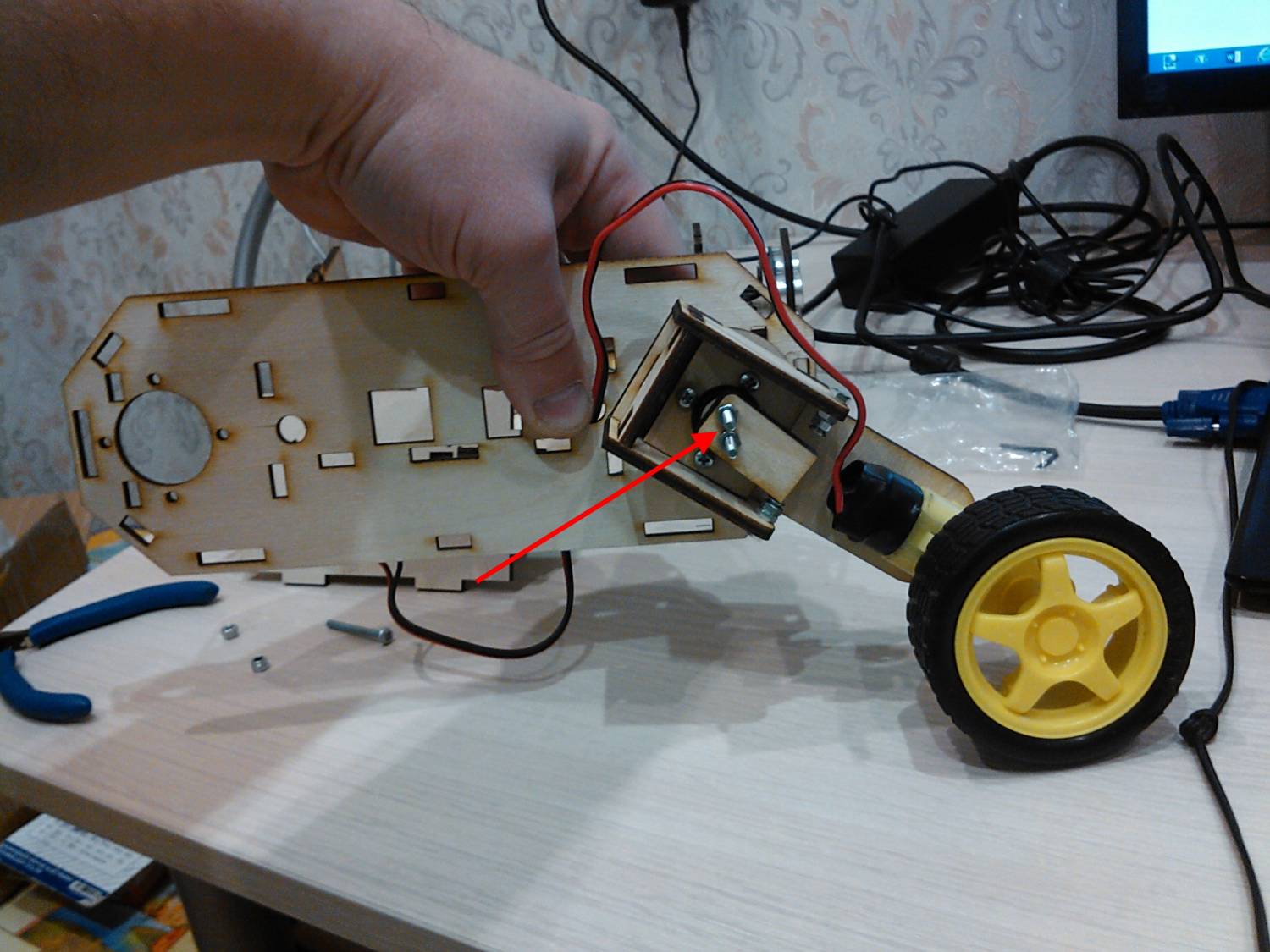
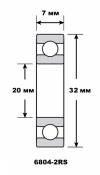
| Примерно так будет выглядеть механизм крепления лап на SBRover Bot. Возможно на фото конструкция выглядит громоздко. До этого хотел везде использовать только подшипники 61801-2RS. Но когда начал чертить, то оказалось, что это не очень удобно, возможно пересмотрю этот вопрос.
|
| |
| |
| ZSeregaA | Дата: Вторник, 04.11.2014, 21:50 | Сообщение # 8 |
|
Лейтенант
Группа: Администраторы
Сообщений: 61
Репутация: 2
Статус: Offline
| Решил для серво не использовать родные крепления. Сервы будут просто зажаты со всех сторон стенками. Таким образом держались моторы в R-Frame Mini
|
| |
| |
| ZSeregaA | Дата: Среда, 05.11.2014, 01:02 | Сообщение # 9 |
|
Лейтенант
Группа: Администраторы
Сообщений: 61
Репутация: 2
Статус: Offline
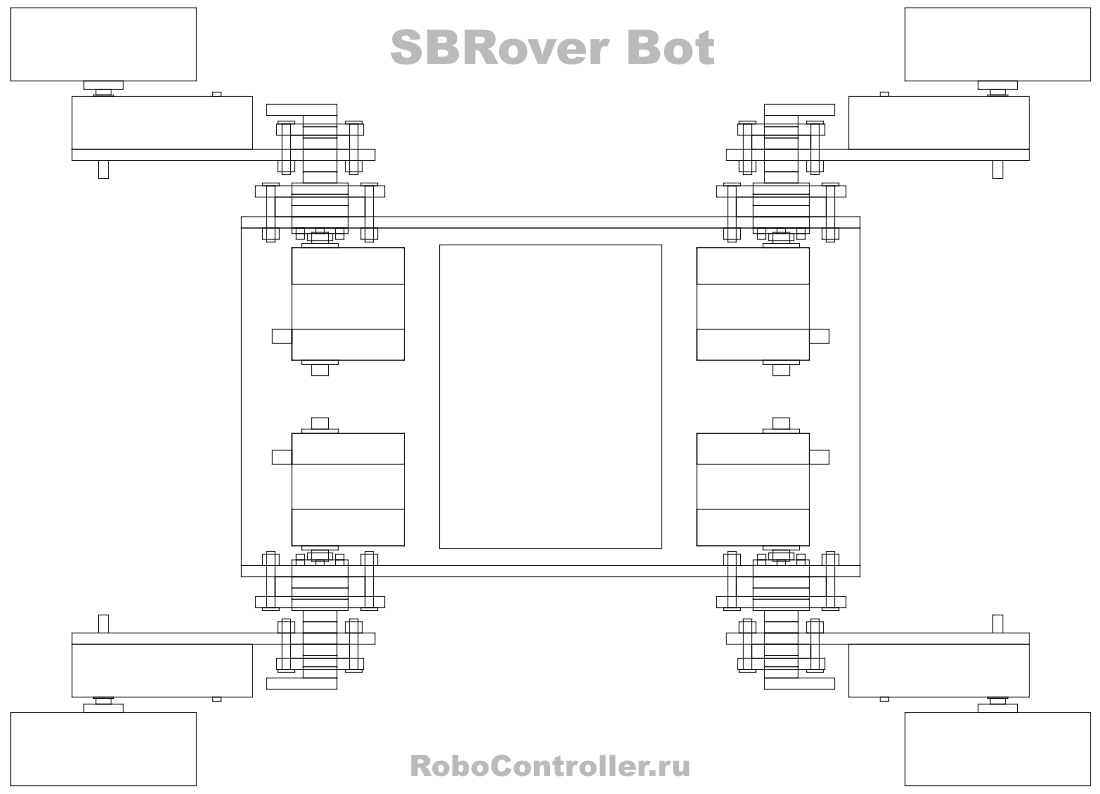
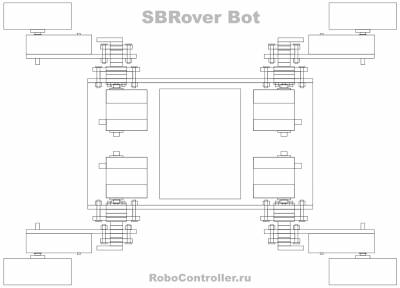
| Вот что получается, размеры конечно внушительные (примерно): ширина 276 мм, длинна с горизонтально вытянутыми лапами 384 мм. Вес точно будет больше 1 кг., эти редукторы уже таскали такой вес, там ещё и колеса были больше (WheelXBot). Думаю с этим роботом тоже справятся.
|
| |
| |
| ZSeregaA | Дата: Среда, 12.11.2014, 15:39 | Сообщение # 10 |
|
Лейтенант
Группа: Администраторы
Сообщений: 61
Репутация: 2
Статус: Offline
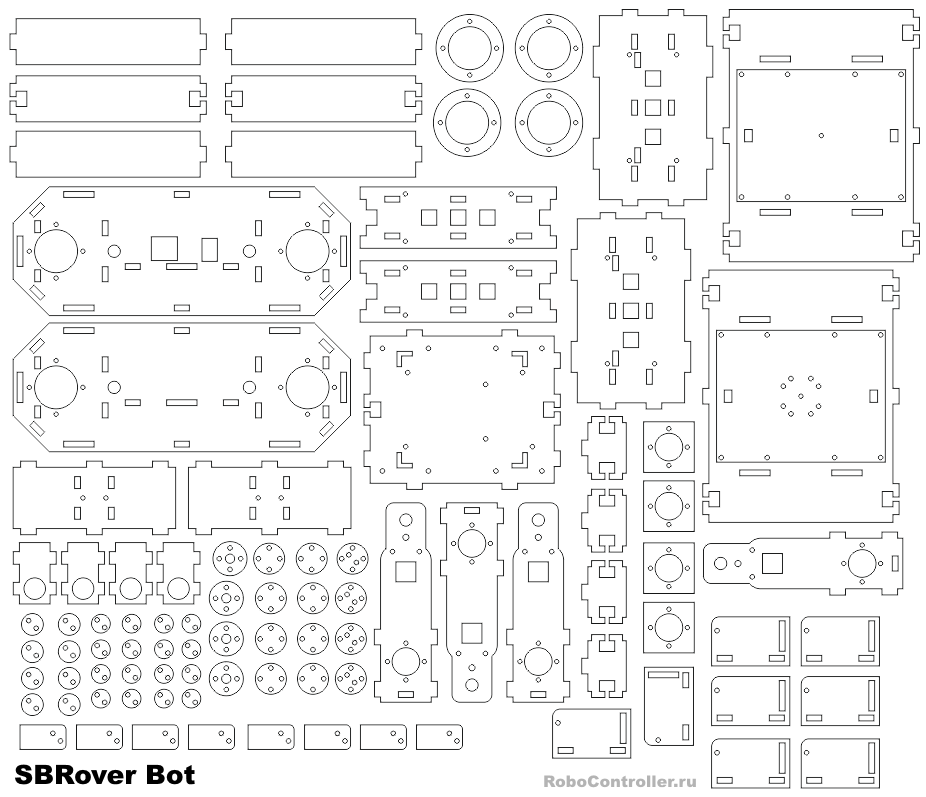
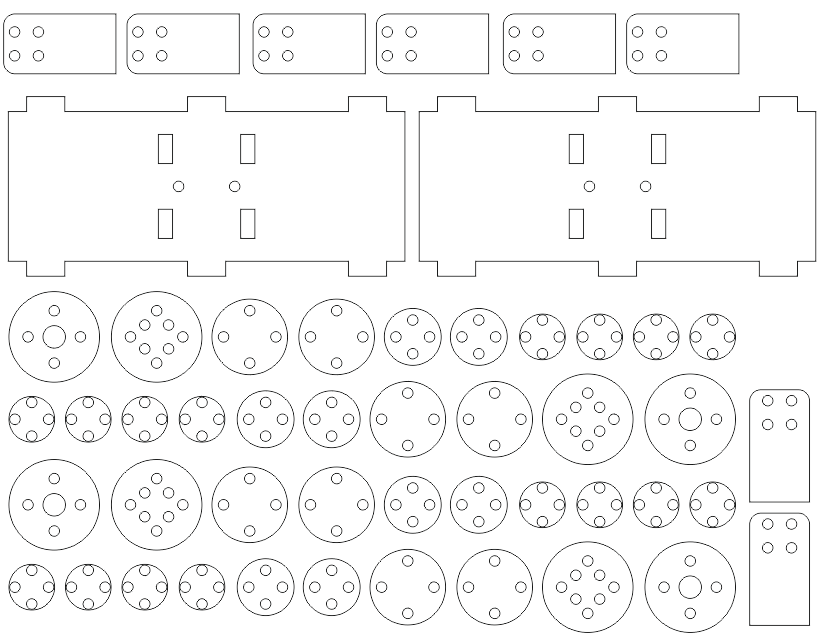
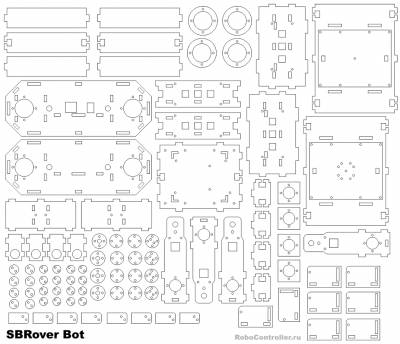
| Чертеж готов для резки. Надеюсь я ничего не забыл и нигде не ошибся.
|
| |
| |
| ZSeregaA | Дата: Четверг, 13.11.2014, 00:24 | Сообщение # 11 |
|
Лейтенант
Группа: Администраторы
Сообщений: 61
Репутация: 2
Статус: Offline
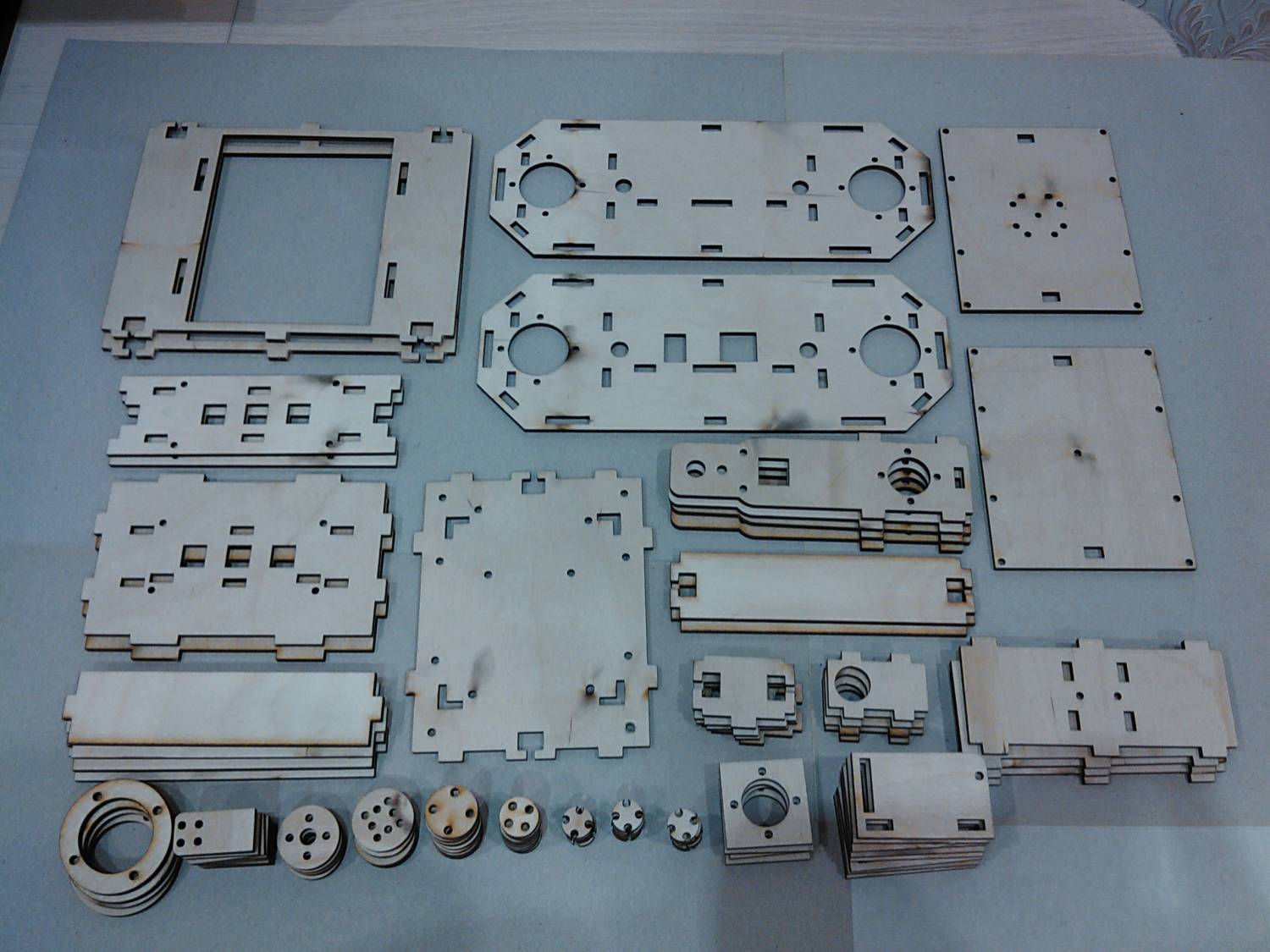
| Детали вырезал, но забыл парочку деталей. Сервы в своих местах сидят идеально. Они просто зажаты стенками с трех сторон. В узле лапы выяснился небольшой недочет. В части, где вал переходит в меньший диаметр в валу проходит 2 винта. Из за этого жесткости нет, вал можно легко повернуть вокруг своей оси на большой угол. Переделаю эту часть вала и добавлю забытые детали.
|
| |
| |
| ZSeregaA | Дата: Четверг, 13.11.2014, 15:36 | Сообщение # 12 |
|
Лейтенант
Группа: Администраторы
Сообщений: 61
Репутация: 2
Статус: Offline
| Переделал вал, в предыдущей версии выяснился недочет и ещё я забыл уменьшить отверстия под винты в валу. Из за этого, конструкция была не прочной. Сегодня вырежу недостающие и переделанные детали и соберу. Для проверки собрал корпус, получается красиво, хотя и немного громоздко.
|
| |
| |
| ZSeregaA | Дата: Пятница, 14.11.2014, 00:57 | Сообщение # 13 |
|
Лейтенант
Группа: Администраторы
Сообщений: 61
Репутация: 2
Статус: Offline
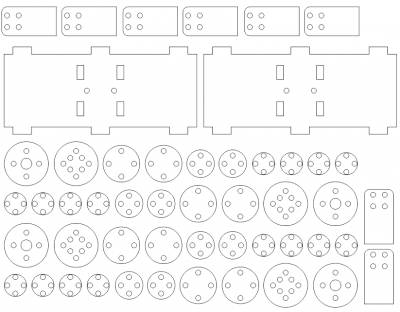
| Вырезал переделанные и недостающие детали, докупил винтиков. Некоторые из винтиков будут с потайной шляпкой, так как в магазине не было нужных размеров с полусферическими шляпками. Но на видных местах будут с полусферическими, они мне нравятся, выглядят красиво и атмосферно. Постараюсь сделать фото и видео всех шагов сборки.

|
| |
| |
| ZSeregaA | Дата: Суббота, 15.11.2014, 03:45 | Сообщение # 14 |
|
Лейтенант
Группа: Администраторы
Сообщений: 61
Репутация: 2
Статус: Offline
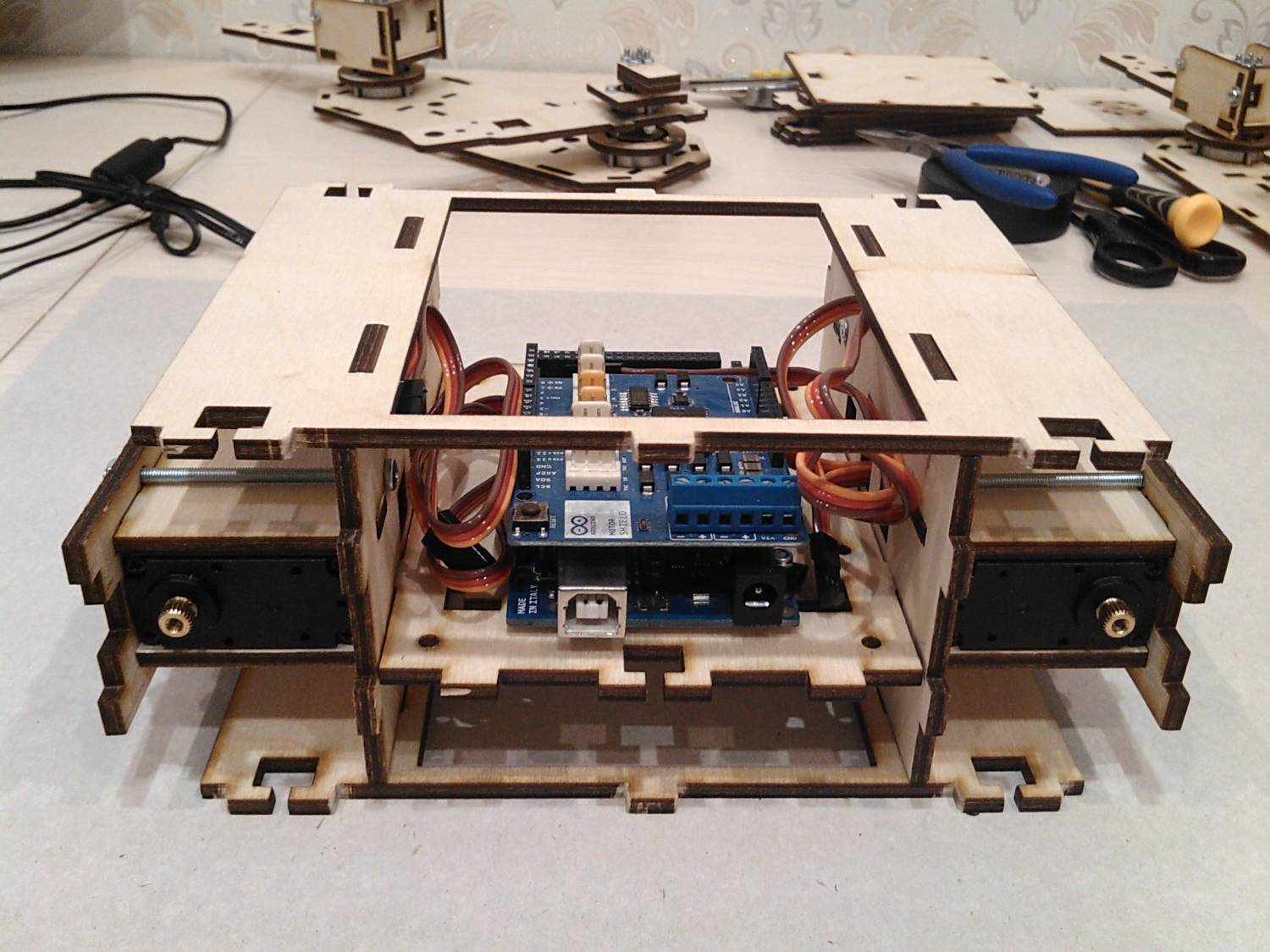
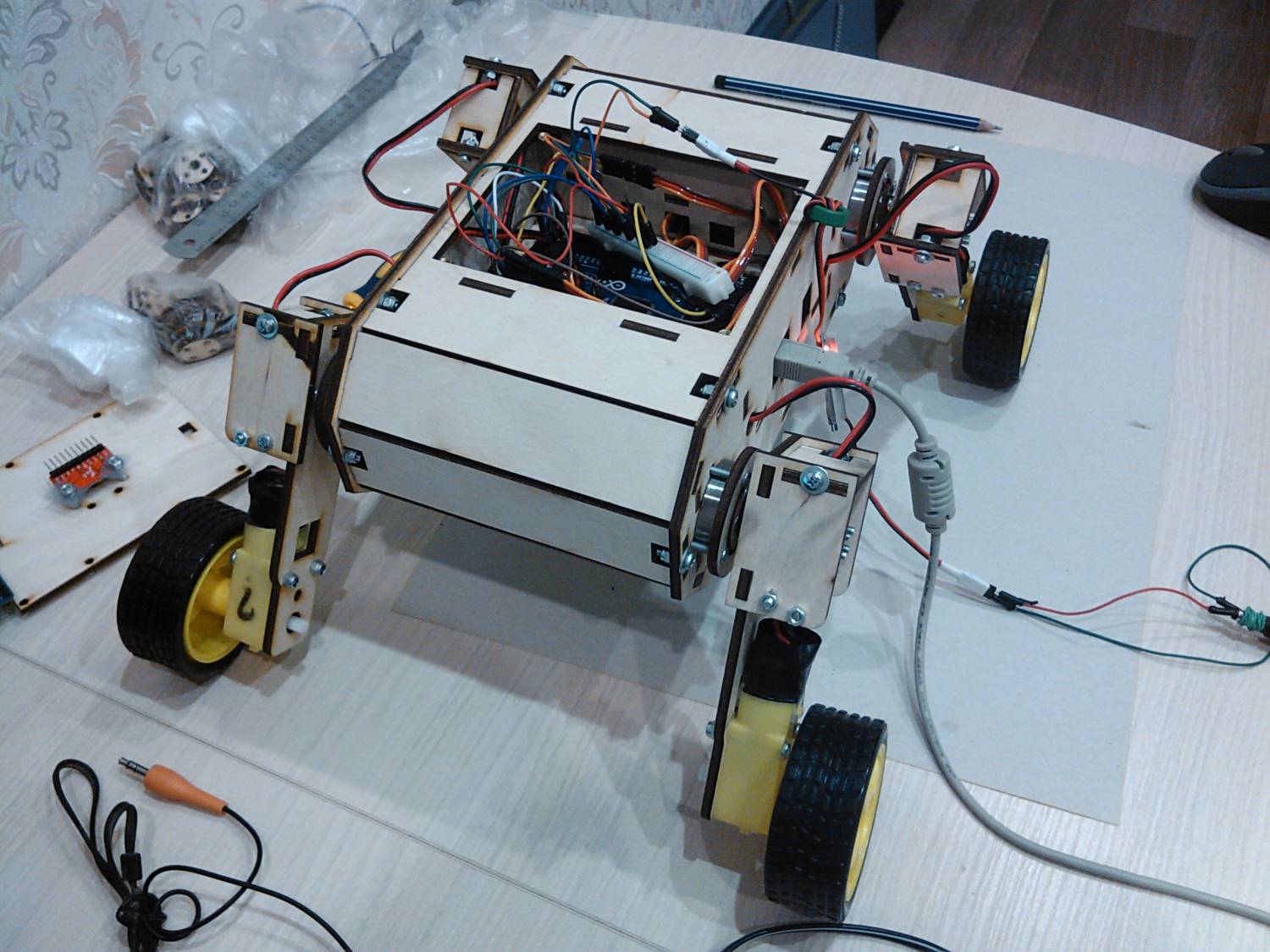
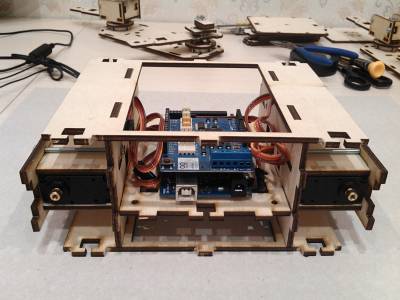
| Собрал корпус. Изначально думал, что собирать будет сложнее, но проблем не возникло. Но законченной вида у робота еще нет. Вот что осталось сделать: собрать лапы, поставить моторы и колеса, поставить и подключить электронику, аккумуляторы. На фото внутренний скелет робота.
|
| |
| |
| ZSeregaA | Дата: Воскресенье, 16.11.2014, 04:24 | Сообщение # 15 |
|
Лейтенант
Группа: Администраторы
Сообщений: 61
Репутация: 2
Статус: Offline
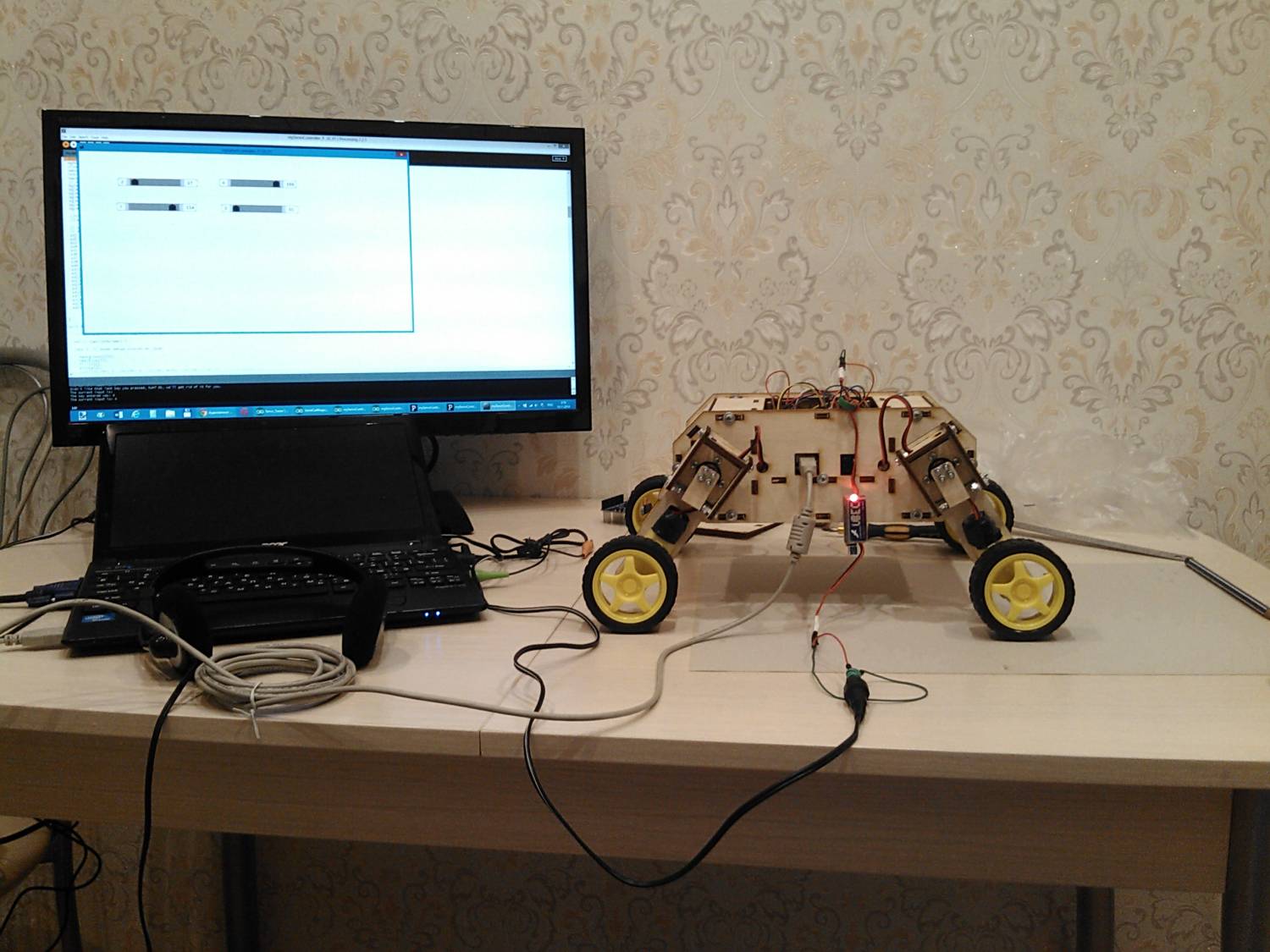
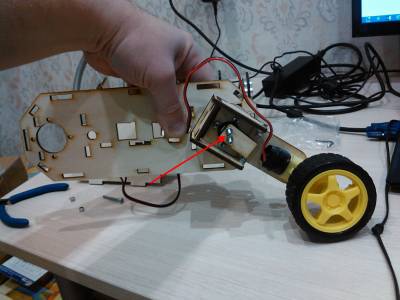
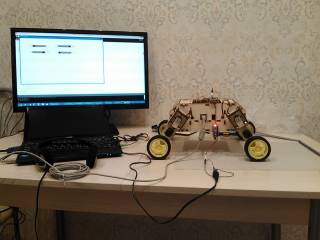
| Сегодня поставил на колеса, но обкатку не проходил. В первую очередь проверил работу лап, управлял подъемом и опусканием. Лапки оказались «жидковаты». Механизм учета касания поверхности (Сообщение # 2) усложнил конструкцию и снизил жесткость лап. Основная идея для которой я хотел использовать этот узел, стала не актуальна в ходе сборки. Покатаюсь, посмотрю как ведет себя робот и будет ли работать механизм учета касания так, как задумывался. Если не оправдает ожиданий, изменю конструкцию и сделаю новые лапы.
Что осталось сделать: Подключить моторы, поставить блютуз, поставить контакты на механизм учета касаний.
|
| |
| |