






Ищите меня тут
![]()
![]()
![]()
![]()
Мы на Android


Последние записи
Записи на форуме
Случайная картинка

Случайное видео
Статистика
Онлайн всего: 1
Гостей: 1
Пользователей: 0
Главная » 2013 Сентябрь 6 » WheelXBot - нестандартная машина управляемая тв пультом
|
WheelXBot - нестандартная машина управляемая тв пультом
Проекты | 06.09.2013 в 21:20 | от: ZSeregaA | Просмотров:
 32900 |
Комментариев: 32900 |
Комментариев:  7 |
Рейтинг: 7 |
Рейтинг:  5.0 / 2 5.0 / 2
|
Увидев видео в котором демонстрировалась машина необычного исполнения, решил сделать её лайт версию. Для создания этого колесного чуда, использовал подручные материалы и имеющиеся у меня компоненты. Результат конечно не дотянул до ожидаемого. Но в домашних условиях всё работает. Выкладываю всё что делал, возможно кому то данный материала будет полезен. 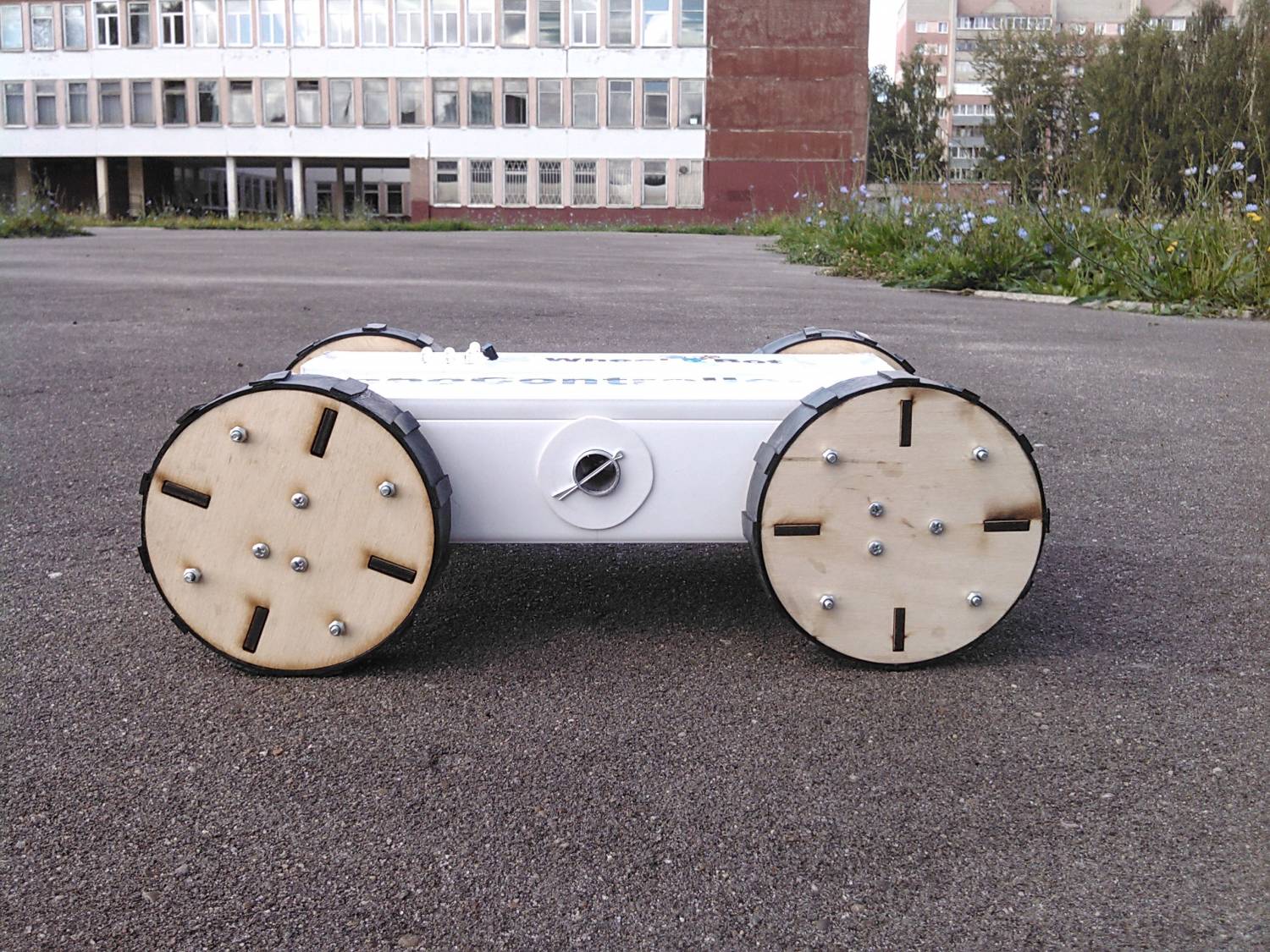  Итак давайте знакомиться с WheelXBot. Это не робот, а просто машина состоящая из 2-х половинок. Обе половины соединены центральным валом на котором они могут вращаться. Корпус изготовлен из кабель-канала 60x60. Привод из 4-х мотор-редукторов с увеличенными колесами. Индикация и освещение - 16 разноцветных светодиодов. Три режима скорости, два режима поворотов. Управление от ИК пульта. Мозг - Arduino Mega + Motor Shield. Питание - 3 аккумулятора 3.7V 2400mAh. Что из этого получилось смотри на видео. После видео расскажу о недостатках и преимуществах. А также инструкция по сборке. Все видеоролики с WheelXBot смотрите ТУТ. Преимущество конструкции WheelXBot: одна половинка может преодолевать довольно высокие или глубокие препятствия в то время как вторая половинка находиться на земле. При этом WheelXBot не заваливается и не опрокидывается. Недостатков конечно же больше, но все они относятся к составляющим машины. ИК управление не подходит для использования на улице, радиус действия снижается. Слабые мотор-редукторы. Из за них почти не работает поворот на месте, не хватает тяги для преодоления препятствий и крутых подъемов. Инструкция по сборке WheelXBot: Если вы надумаете собрать подобный корпус, то при выборе моторов, учитывайте вес готовой машины. WheelXBot получился увесистым, 1 кг. 233 г.  Список нужных для сборки компонентов: 1. Кабель-канал 60х60 не менее 1 метра. Для изготовления корпуса. 2. Алюминиевая труба, внешний диаметр 18мм., длинна не менее 140 мм. Центральный вал. 3. Два шплинта 2х28мм. Для крепления центрального вала. 4. Четыре уголка + 8 винтов с гайками из детского железного конструктора. Для крепления передних и задних стенок. 5. Винты M3 30мм. с потайной головкой и гайки - 8 шт. Используются для крепления мотор редукторов. 6. Разноцветные светодиоды 5мм для индикации. Если не делать фары, то достаточно 6 шт. Если нужны фары, 8 ярких, белых, 2 красных. 6. Фотоприемник TSOP4838 или другой проверенный. 7. Часть макетной платы для развода питания светодиодов. 8. Стойки для крепления печатных плат 25мм. 2 - 3 шт. Используются вот такие стойки. 9. Плата Arduino. Используется Arduino Mega 2560. 10. Мотор-редукторы и колеса 4 шт. 11. Элементы питания. Используются TrustFire 18650 2400mAh 3.7V - 3 шт. 12. Выключатель для питания. 13. Дрель или шуруповерт. 14. Винты M3 50мм. с потайной головкой и гайкой - Фиксатор вала. 15. Сверла 8мм, 5мм, 4мм, 3мм, 2мм, сверло по дереву перо 18мм. Приступаем к сборке. Я собирал не последовательно и по этому на некоторых фотографиях будут видны части которые не были установлены в пройденных шагах. Чтобы не мучатся, делайте всё по инструкции. 1. От кабель-канала отрежьте 2 части по 260мм. Отметьте центр с двух сторон на каждой половинке. И просверлите отверстия (сверло по дереву перо 18мм). Вот что должно получиться:   Проверьте, чтобы алюминиевая труба свободно входила и вращалась в отверстиях. Отверстия можно подогнать шкуркой (нулевкой). 2. Возьмите мотор-редуктор и отметьте место где будет находится центр ведущего вала. Мотор-редуктор не должен выставляться за передние и задние края корпуса. Просверлите там отверстие (перо 18мм). И 2 отверстия для крепления мотора (сверло 3мм). Закрепите моторы. Вот что у вас должно получиться.  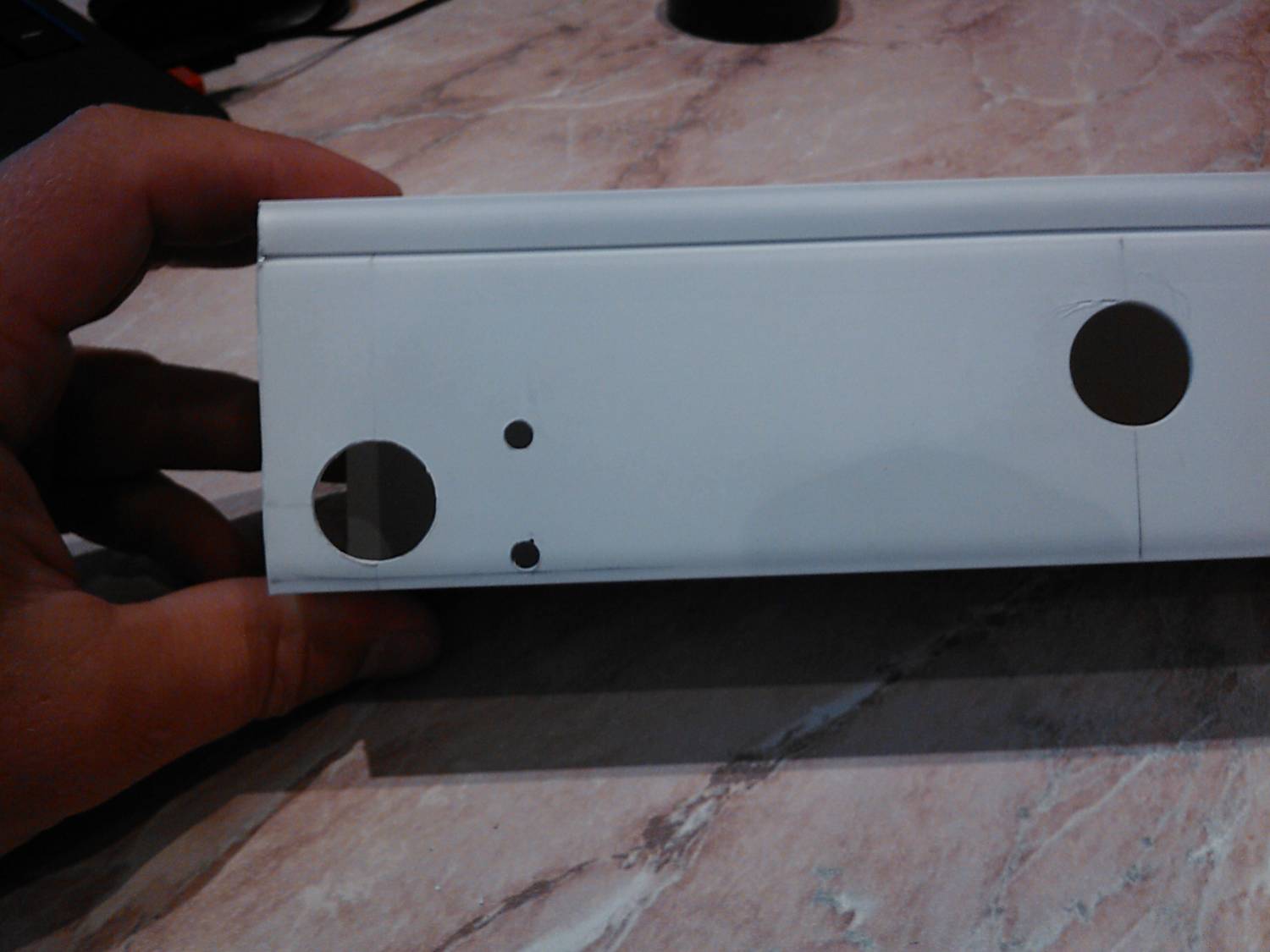   3. В заднюю-правую часть положите плату Ардуино и отметьте отверстия в которые будут вставляться стойки. Просверлите отверстия нужного диаметра (сверло 3 - 2мм). 4. Отрежьте от крышки кабель-канала, 4 части по 60мм в длину. Удалите внешние края зацепов. Подрежьте нижние края зацепов на толщину стенок кабель-канала. А также подрежьте верхние края на глубину зацепов. Должно получится так.   В задней левой крышке сделайте отверстие под переключатель. В задней правой отверстие под USB штекер. Если у вас будут фары, тогда просверлите отверстия (сверло 5мм) под светодиоды. Установите эти крышки используя уголки винты и гайки из детского железного конструктора (сверло 4мм). 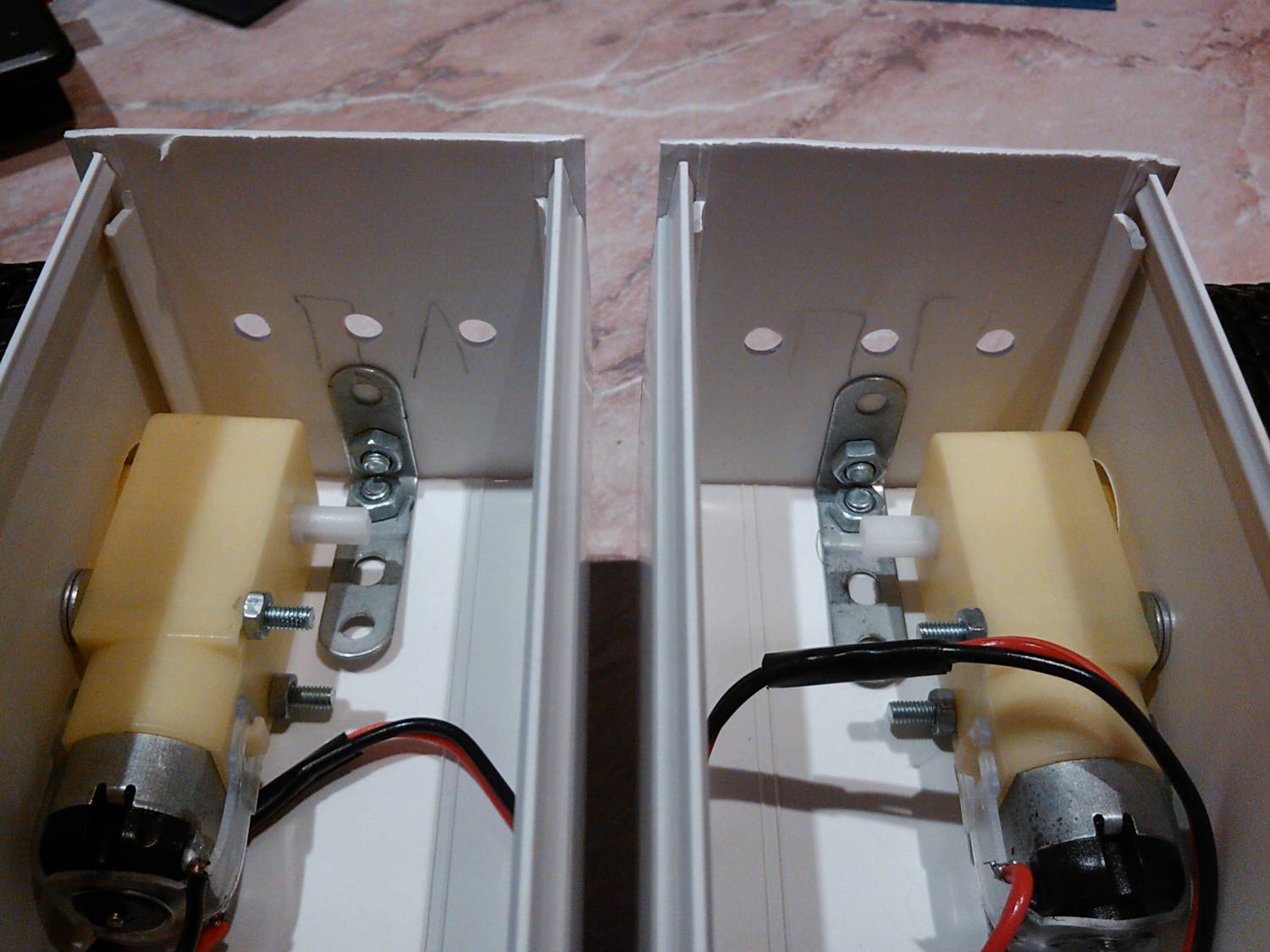 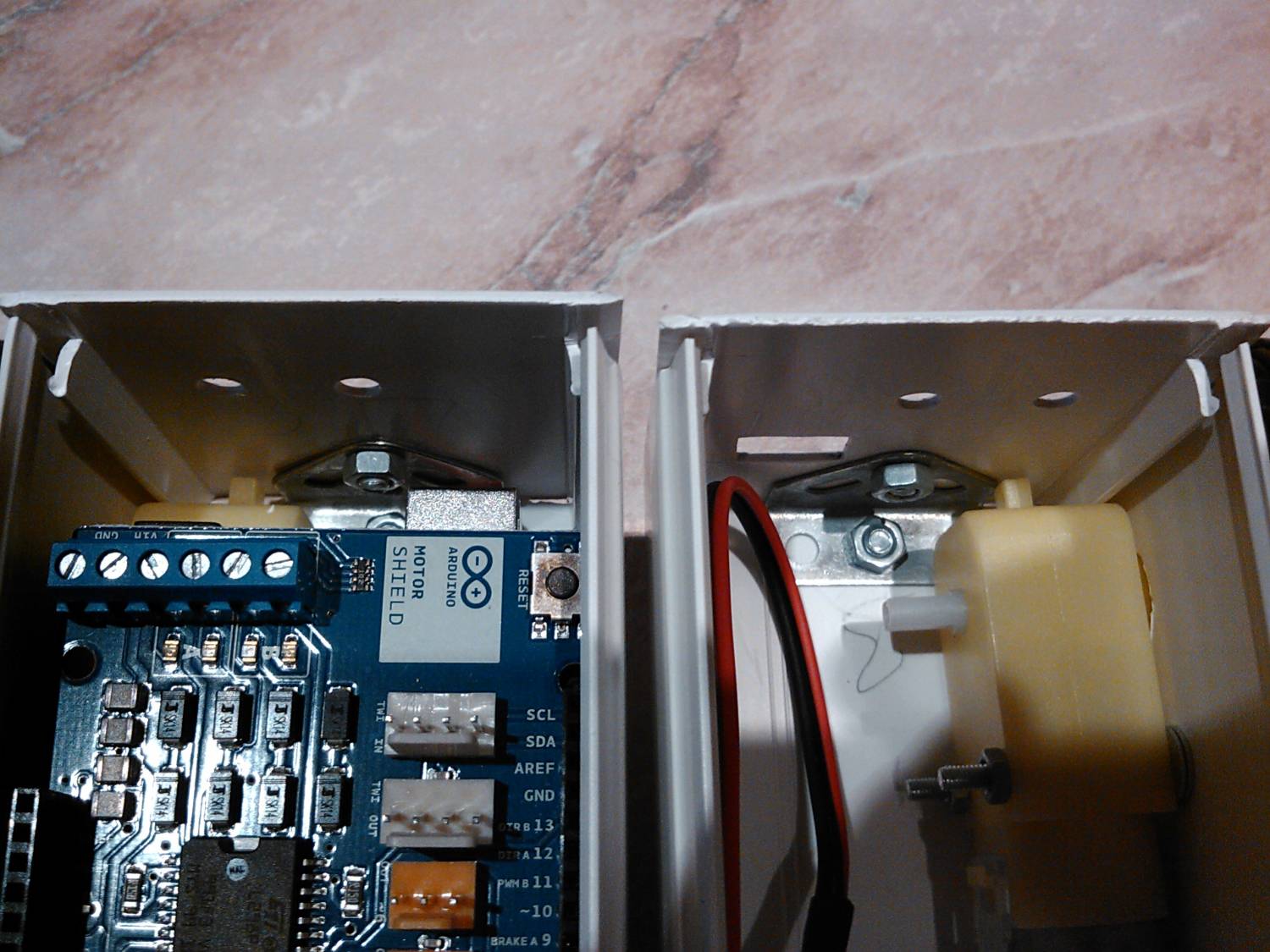 5. Установите моторы. Установите передние и задние стенки. Установите плату Arduino и Motor Shield. Верхняя часть мотор шилд не должна быть выше верхнего края корпуса. Вот как у меня выглядит установленная плата. 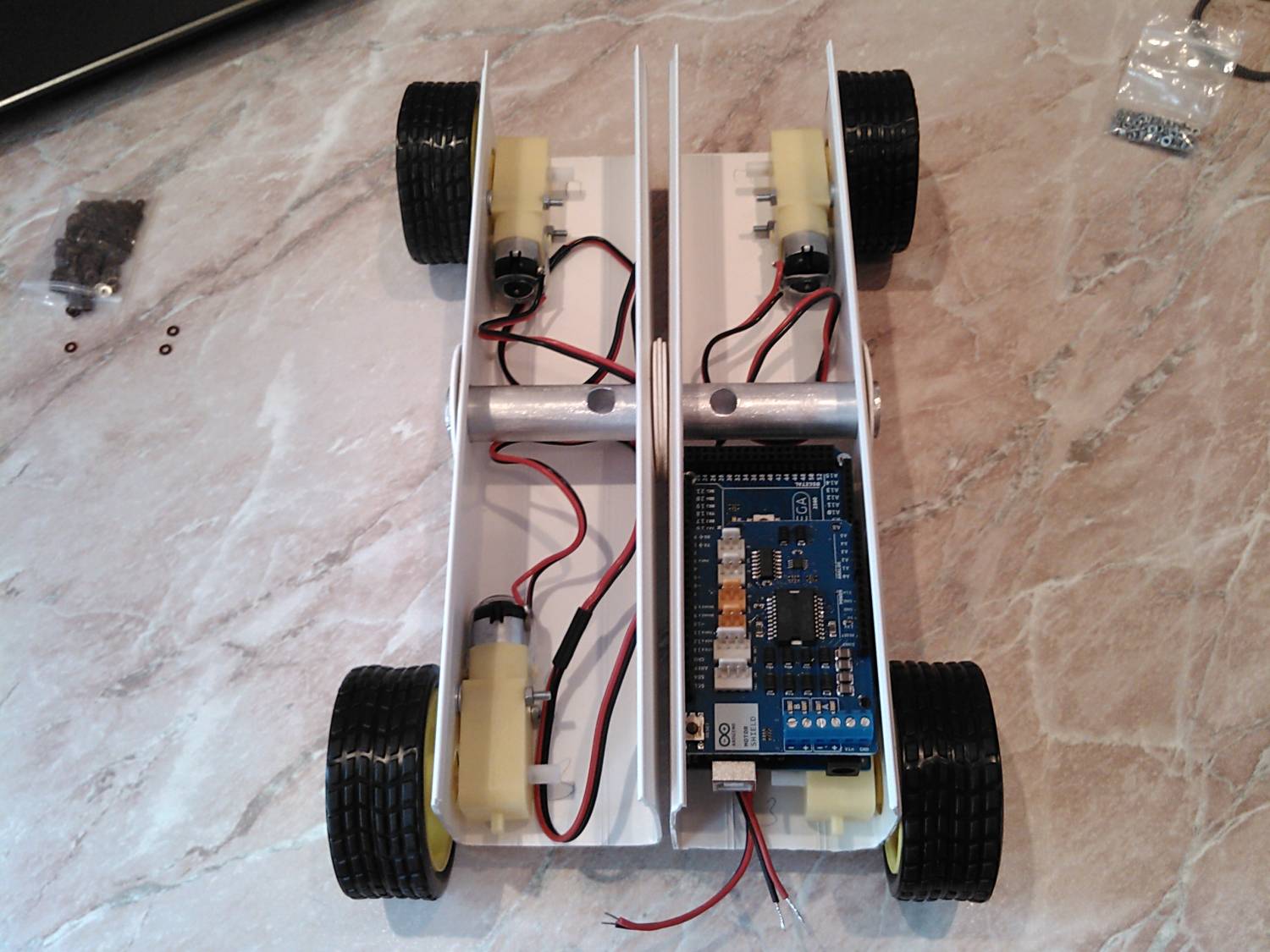 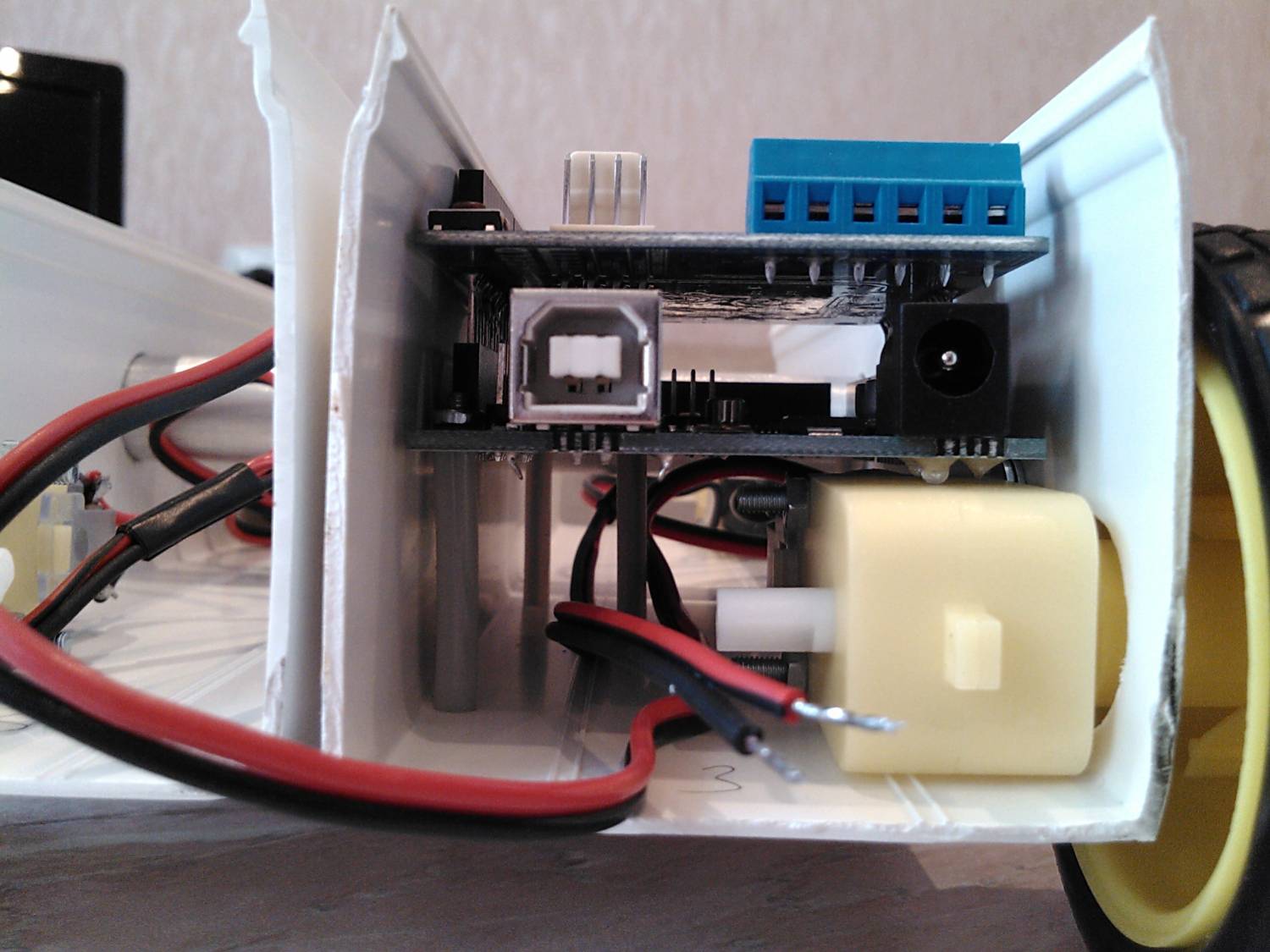 6. Установка центрального вала. От верхней крышки кабель-канала отрежьте 5 кусков длинной 45мм. В центре каждого куска просверлите отверстие (сверло перо 18мм). Из этих заготовок вырежьте шайбы диаметром 45мм. В алюминиевой трубке просверлите достаточное количество отверстий (сверло 8 - 10мм). Через эти отверстия вы будете протаскивать провода из одной половины в другую.   С одной стороны трубки, отступите от края примерно 2-3мм просверлите сквозное отверстие под шплинт (сверло 2мм). Между шплинтом и корпусом установите шайбу. Между половинками корпуса установите 3 шайбы. Оденьте на вал обе половинки. С учетом шайбы и шплинта отпилите лишнюю часть трубы. Просверлите отверстие под шплинт и соедините обе части корпуса на валу.    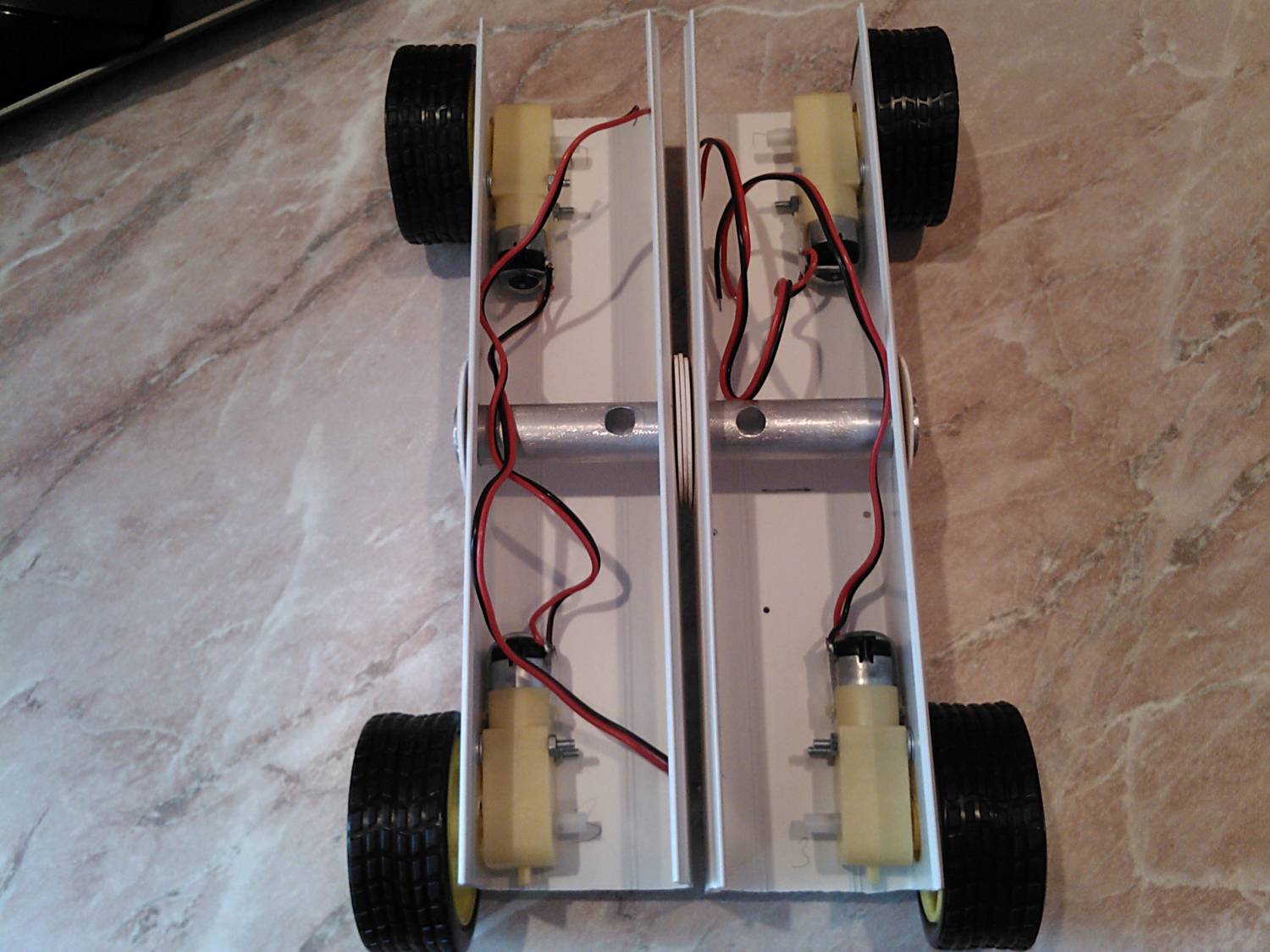 В правой части (там где плата), просверлите сквозное отверстие в трубке и корпусе для установки стопорного винта. Установите винт M3 50мм. 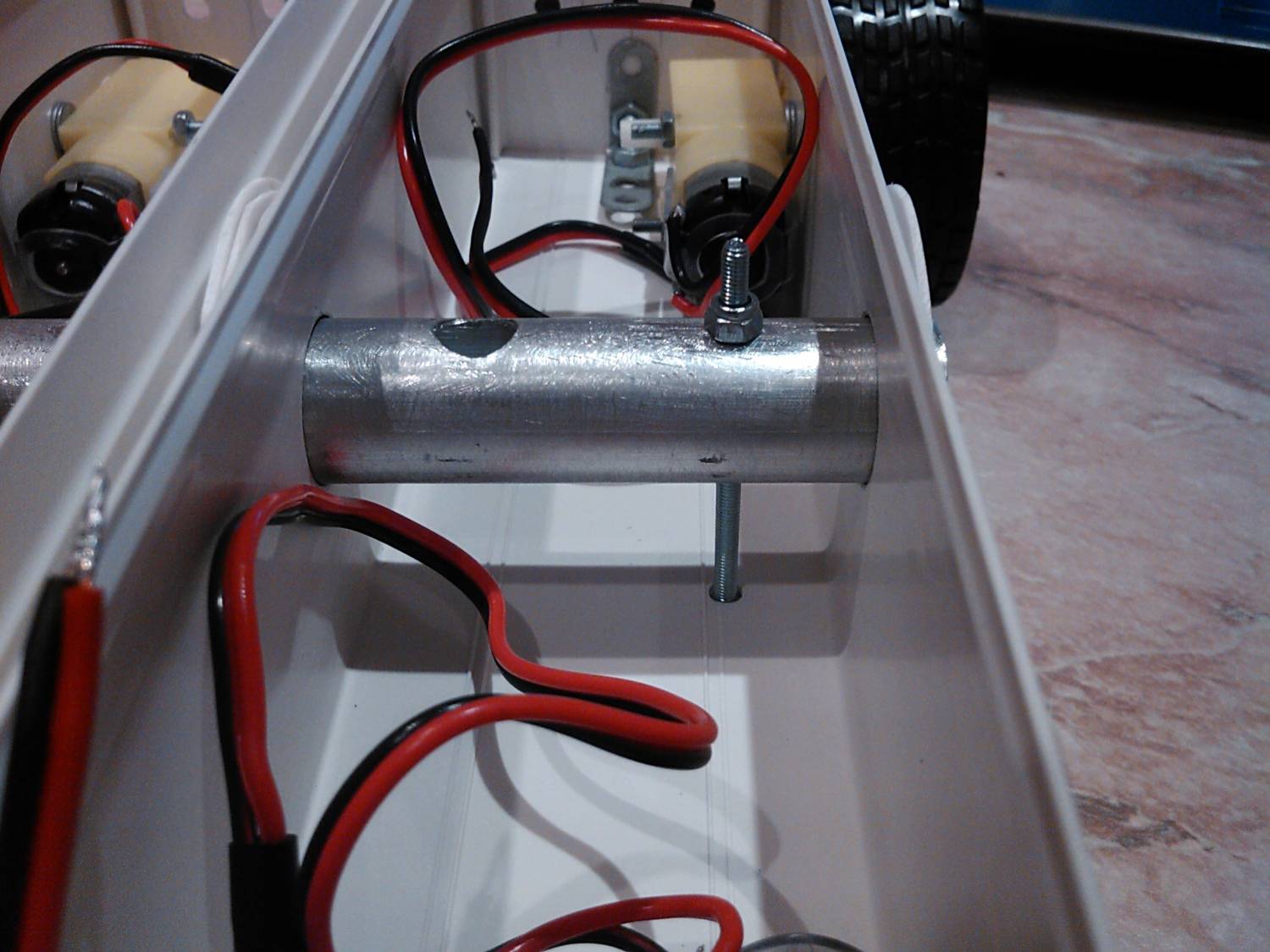 7. Элементы питания у меня находятся в самодельном боксе. Внутри корпуса бокс с аккумуляторами крепиться на двухсторонний скотч.   8. Подключаем моторы. Моторы левой стороны подключены к каналу B на мотор шилд, моторы правой к каналу A. 9. В правой крышке просверливаем нужное количество отверстий. Шесть под диоды (сверло 5 мм), одно под TSOP. Также у правой крыши удаляем внутреннею часть зацепа который упирается в плату. 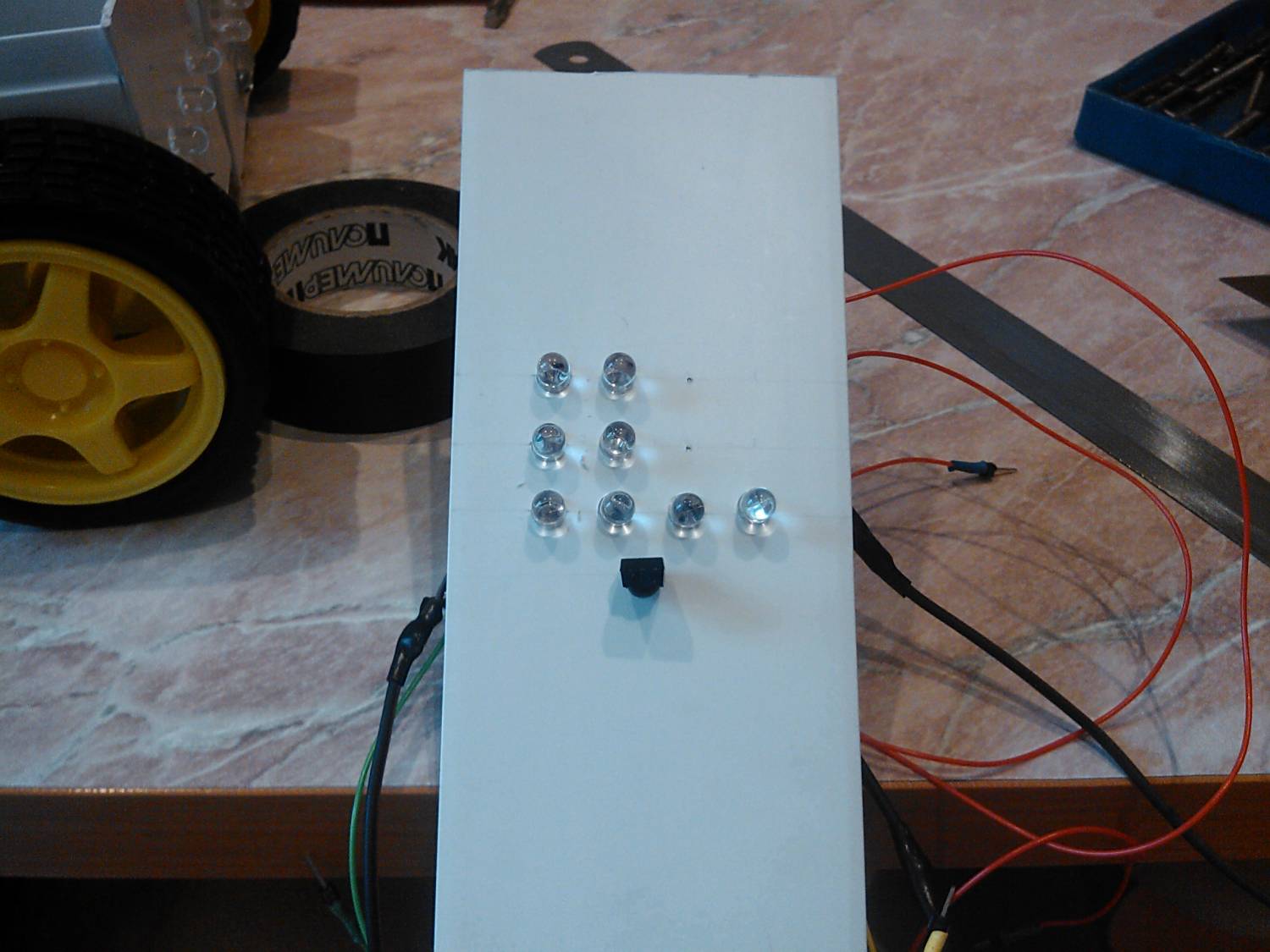  10. Подключаем всю электрику. Светодиоды подключайте к нужным пинам, затем в коде настроите. Вот что у вас должно получиться: На WheelXBot используются увеличенные колеса. Я их сделал для повышения проходимости, вместе с этим увеличилась и скорость. Ну а сейчас программная часть WheelXBot. В коде должно быть всё понятно, почти к каждой строке имеются комментарии. Не забудьте изменить пины светодиодов и TSOP! Предварительный просмотр кода для WheelXBot (смотреть). Скачать файл: WheelXBot_10_s.ino Скачать архив: WheelXBot_10_s.zip Это может быть вам интересно: |
| Всего комментариев: 7 | |
|
| |
