|
SBRover Bot
|
|
| ZSeregaA | Дата: Понедельник, 17.11.2014, 02:42 | Сообщение # 16 |
 Лейтенант
Группа: Администраторы
Сообщений: 61
Репутация: 2
Статус: Offline
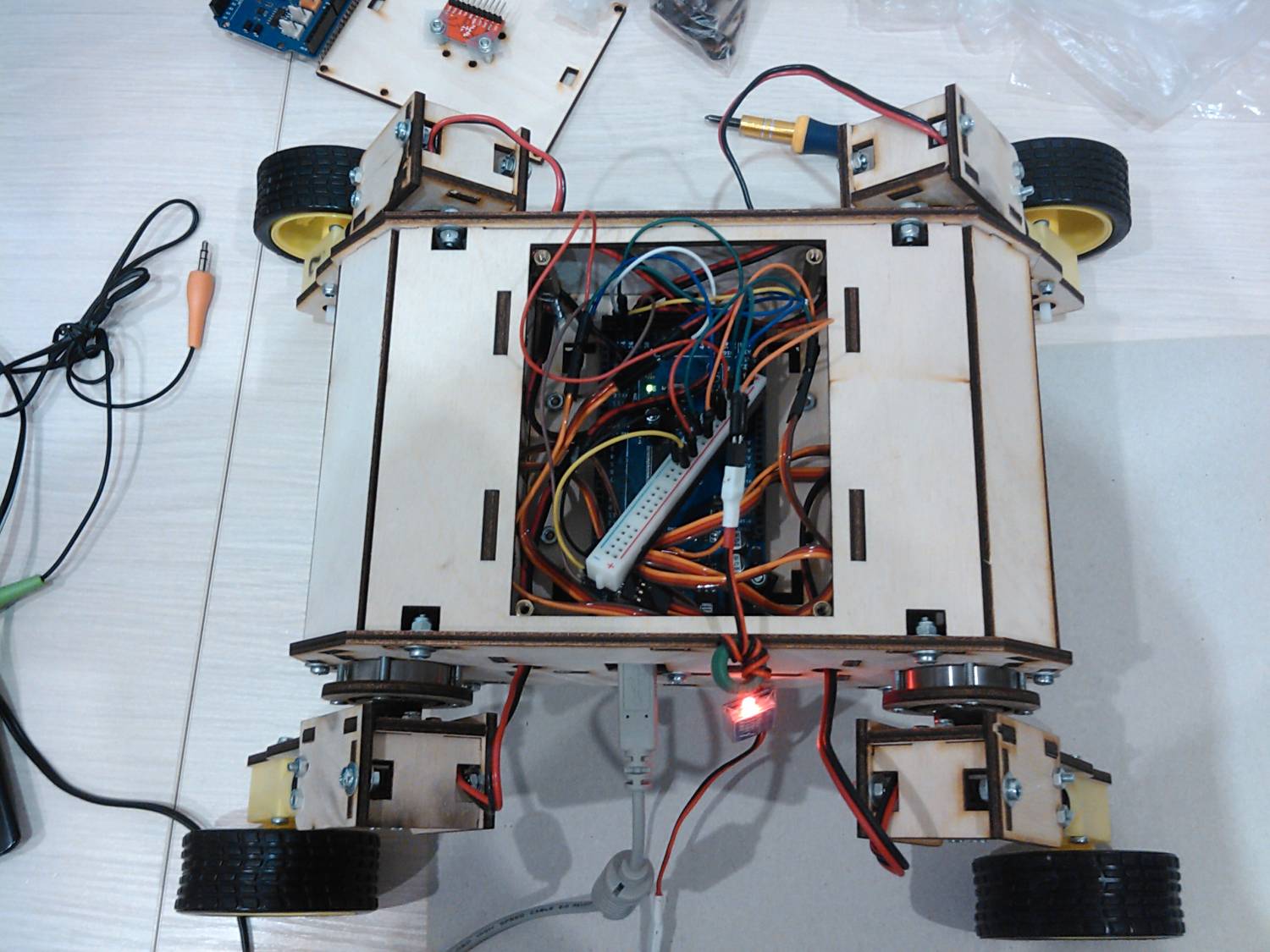
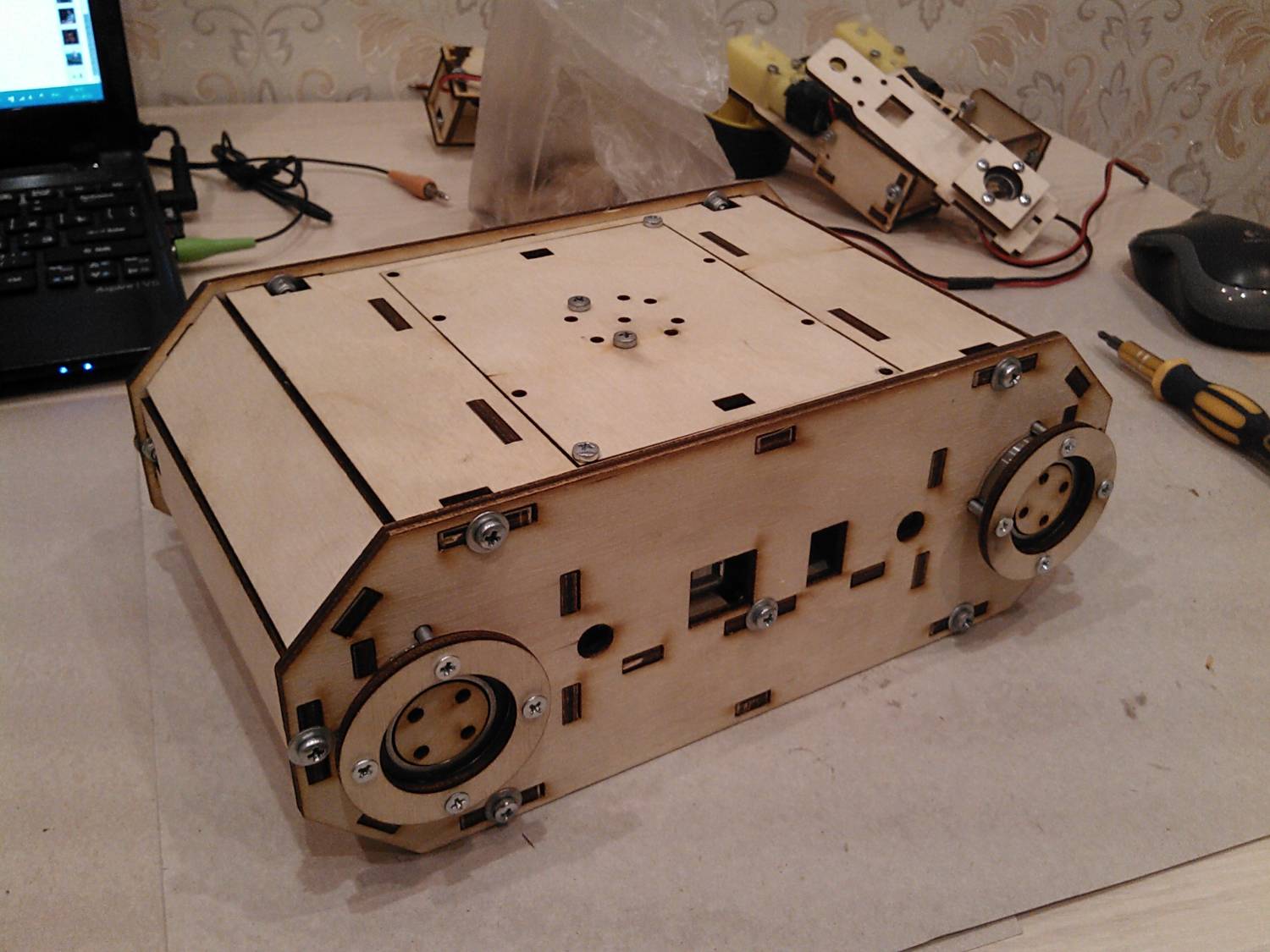
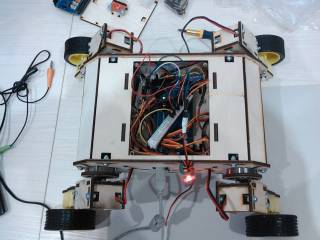
| Подключил электронику и поставил аккумуляторы. Контакты на лапах подключать не стал, поставлю там болтики подлиннее, чтобы лапы меньше болтались. Осталось самое сложное, написать правильный код. На дня оформлю новость об этом роботе, выложу фото со сборкой и возможно видео. На фото, как было во время первой проверки и как стало после подключения всего необходимого.
|
| |
| |
| ZSeregaA | Дата: Пятница, 21.11.2014, 02:38 | Сообщение # 17 |
|
Лейтенант
Группа: Администраторы
Сообщений: 61
Репутация: 2
Статус: Offline
| Вчера написал простую программку управления, катался и управлял лапами робота. Для управления использовал http://remotexy.com/ru/ В ходе тестового заезда выяснил несколько вещей:
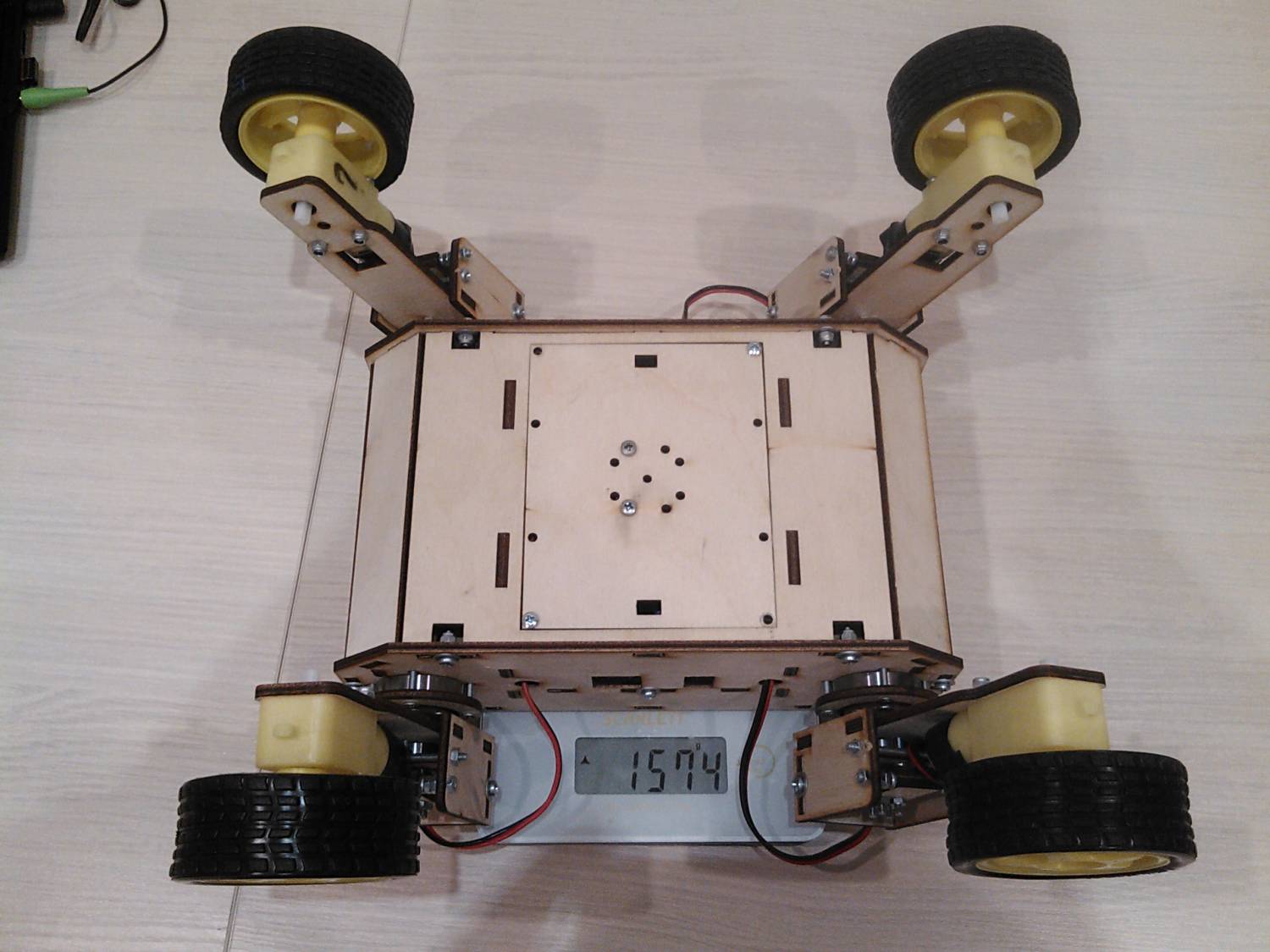
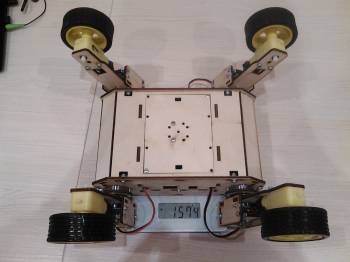
Вес робота 1574 грамм. Но на колесах он передвигается быстро и вполне маневренно для своих размеров. До последнего момента хотел сделать контакты на лапах, но после того как поездил, понял, что это не реально, по крайней мере с такой конструкцией. При разворотах лапы передвигались из за свободного хода в механизме контактов.
Сервоприводы ведут себя нормально, поднимают и опускают вес робота. В описании к сервоприводам написано: «механический угол 360 градусов». Внутри нет никаких стопоров, без подключения, вручную её можно крутить как моторчик. В тестовых заездах выяснил следующее, если робот на лапах поднялся высоко и наезжает на препятствие, его лапы прогибаются. Моторы крутят толкая робота вперед, лапы не выдерживают нагрузки и прогибаются. Если остановить движение моторов, лапы не возвращаются в исходное положение. Но если управлять сервами, то лапы легко двигаются и даже отталкивают робота от стены. В этих сервах (RDS3115) есть какая-то защита от перегрузок?
На днях начну писать программу для балансировки, в виду того, что я не программист, думаю дастся мне это не легко. Но пробовать нужно. И ещё появилась идея, когда надоест кататься, сделаю лапы из сервоприводов. Получится новая версия собачки. Для этого почти всё есть. Но сначала, нужно реализовать основную идею.
|
| |
| |
| ZSeregaA | Дата: Воскресенье, 23.11.2014, 03:16 | Сообщение # 18 |
|
Лейтенант
Группа: Администраторы
Сообщений: 61
Репутация: 2
Статус: Offline
| Видео сборки робота SBRover Bot.
|
| |
| |
| ZSeregaA | Дата: Понедельник, 24.11.2014, 01:07 | Сообщение # 19 |
|
Лейтенант
Группа: Администраторы
Сообщений: 61
Репутация: 2
Статус: Offline
| Видео с балансировкой SBRover Bot:
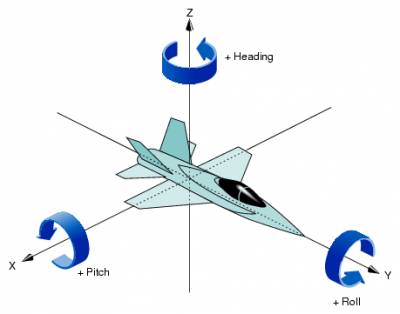
Версия программы балансировки v0.1. Это простая программа которую я написал чтобы проверить идею. Лапы парами реагируют на изменения Pitch и Roll. Нужно конечно сделать, чтобы каждая лапа работала независимо друг от друга. Когда хаотично крутил стол, то было видно, что одна лапа зависала в воздухе, это связано с парной работой лап. Перепишу код, закреплю лапы и буду пробовать дальше. Давно хотел поиграться с балансировкой.
|
| |
| |
| ZSeregaA | Дата: Среда, 26.11.2014, 01:03 | Сообщение # 20 |
|
Лейтенант
Группа: Администраторы
Сообщений: 61
Репутация: 2
Статус: Offline
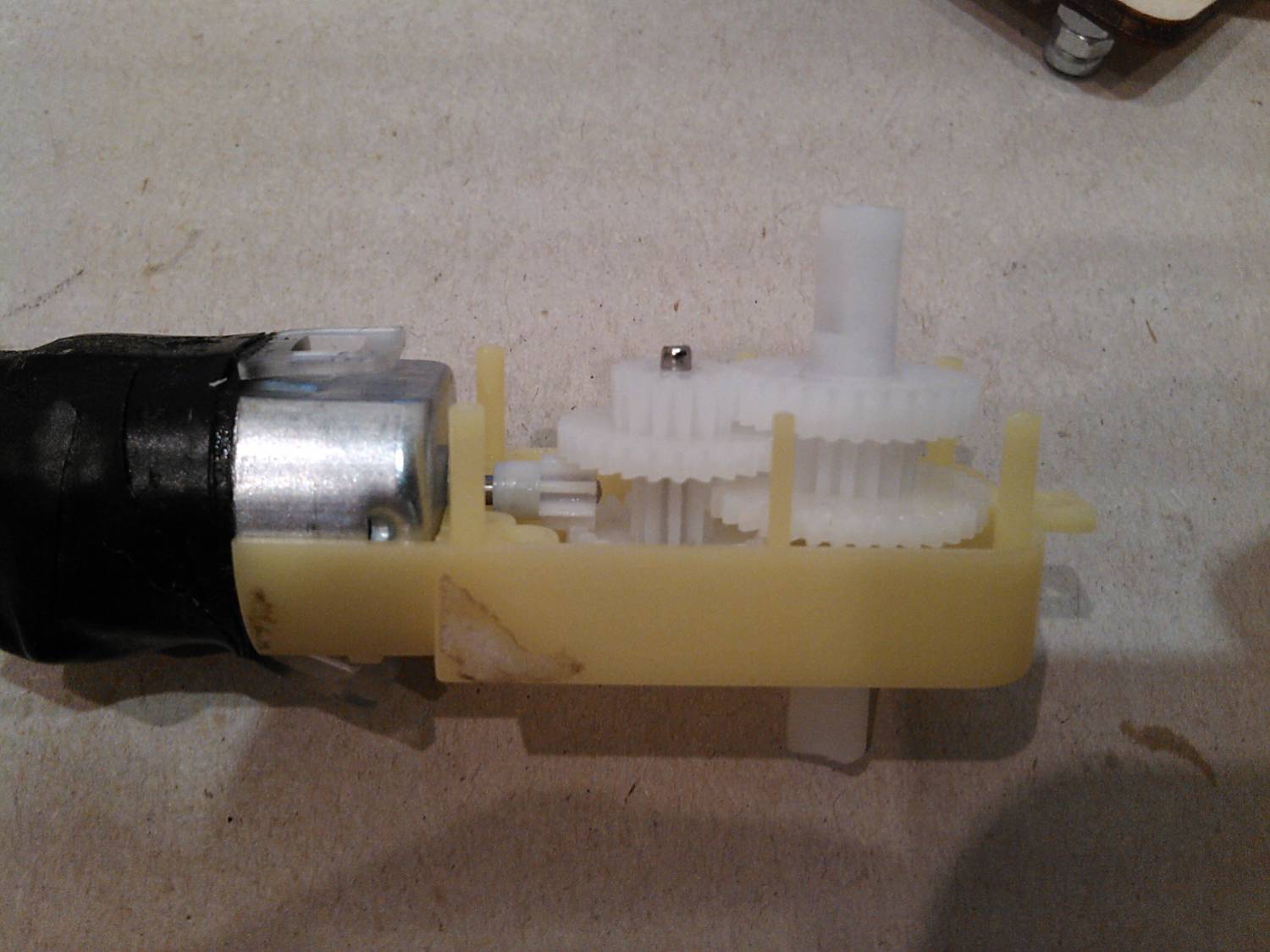
| Для выяснения причин прокручивания колес, разобрал мотор-редуктор. Внутренности редуктора не повреждены, все шестерни целые.
Проблема: Во время того как мотор крутится, колесо под нагрузкой стоит на месте. Без нагрузки, мотор крутит колесо, но даже от небольшого прикосновения к колесу, оно останавливается, а мотор продолжает крутить.
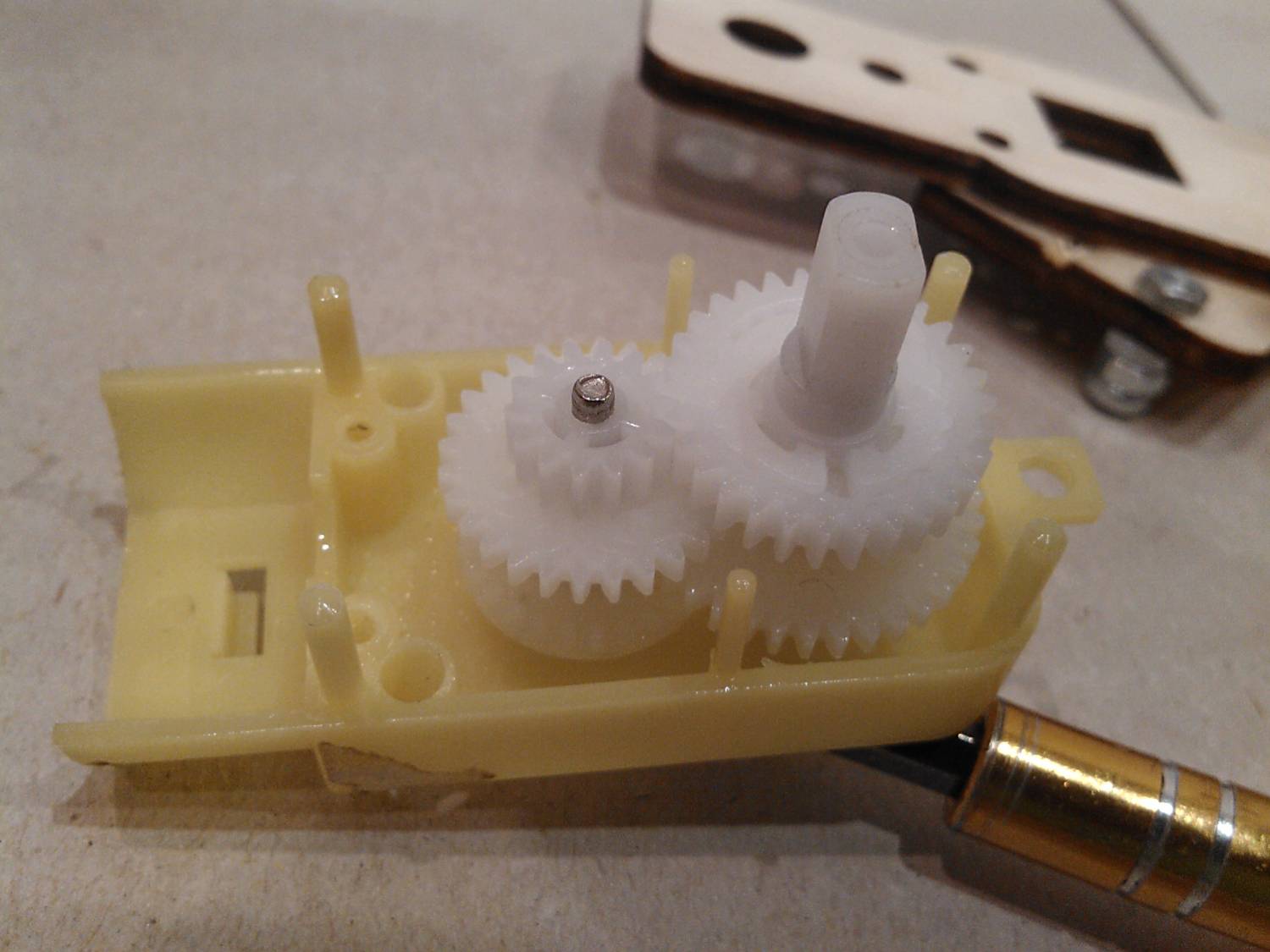
Причина: Вал в редукторе состоит из двух частей, обе части посажены на один стальной штырь. Одна из частей вала имеет шестеренку, на которую и подается крутящий момент. Вторая часть вала пассивно закреплена на стальном штыре, именно на этой части и устанавливал колесо. В то время как часть вала с шестеренкой крутится, она прокручивается на штыре. Из за чего вторая часть вала не крутится.
Решение: Ставить колесо на вал с шестеренкой. В дальнейшем так и буду делать.
Что дальше? На SBRover моторы больше ставить не буду. Поставлю ему лапы из серво. Если сможет передвигать свой вес, то будет новая версия собачки. Но это, уже совсем другая история... 
   

|
| |
| |
| zaratustra | Дата: Воскресенье, 07.12.2014, 11:20 | Сообщение # 21 |
 Рядовой
Группа: Пользователи
Сообщений: 12
Репутация: 0
Статус: Offline
| чем делаете чертежи? в какой программе ?
|
| |
| |
| ZSeregaA | Дата: Воскресенье, 07.12.2014, 23:19 | Сообщение # 22 |
|
Лейтенант
Группа: Администраторы
Сообщений: 61
Репутация: 2
Статус: Offline
| Цитата zaratustra (  ) чем делаете чертежи? в какой программе ?
Использую CorelDraw X6. В ней всё и рисую.
|
| |
| |