






Ищите меня тут
![]()
![]()
![]()
![]()
Мы на Android


Последние записи
Записи на форуме
Случайная картинка

Случайное видео
Статистика
Онлайн всего: 1
Гостей: 1
Пользователей: 0
Главная » 2013 Декабрь 15 » RoboTumbler — самодельный робот неваляшка
|
RoboTumbler — самодельный робот неваляшка
Проекты | 15.12.2013 в 14:38 | от: ZSeregaA | Просмотров:
 35363 |
Комментариев: 35363 |
Комментариев:  14 |
Рейтинг: 14 |
Рейтинг:  5.0 / 6 5.0 / 6
|
|
RoboTumbler - это робот неваляшка. Название робота характеризует его основную функцию. В переводе с английского, Tumbler означает «неваляшка, акробат». Основная задача этого робота, оставаться в горизонтальном положении. Он может самостоятельно встать после падения.
Полгода назад я увлекся робототехникой, до этого момента c электроникой меня ничего не связывало. Впечатленный разнообразием роботов обладающих потрясающими способностями, мне захотелось сделать своего. Смотря ролик про робота NAO, я увидел, как он встает после падения. Не зная как это работает, я решил, что должен сделать, что то подобное. Прошло немного времени, я познакомился с Arduino и понял, что это совсем не сложно. Решил начинать постепенно, чтобы понять все тонкости. И вот сейчас, хочу показать вам робота RoboTumbler, который может автоматически вставать после падения. 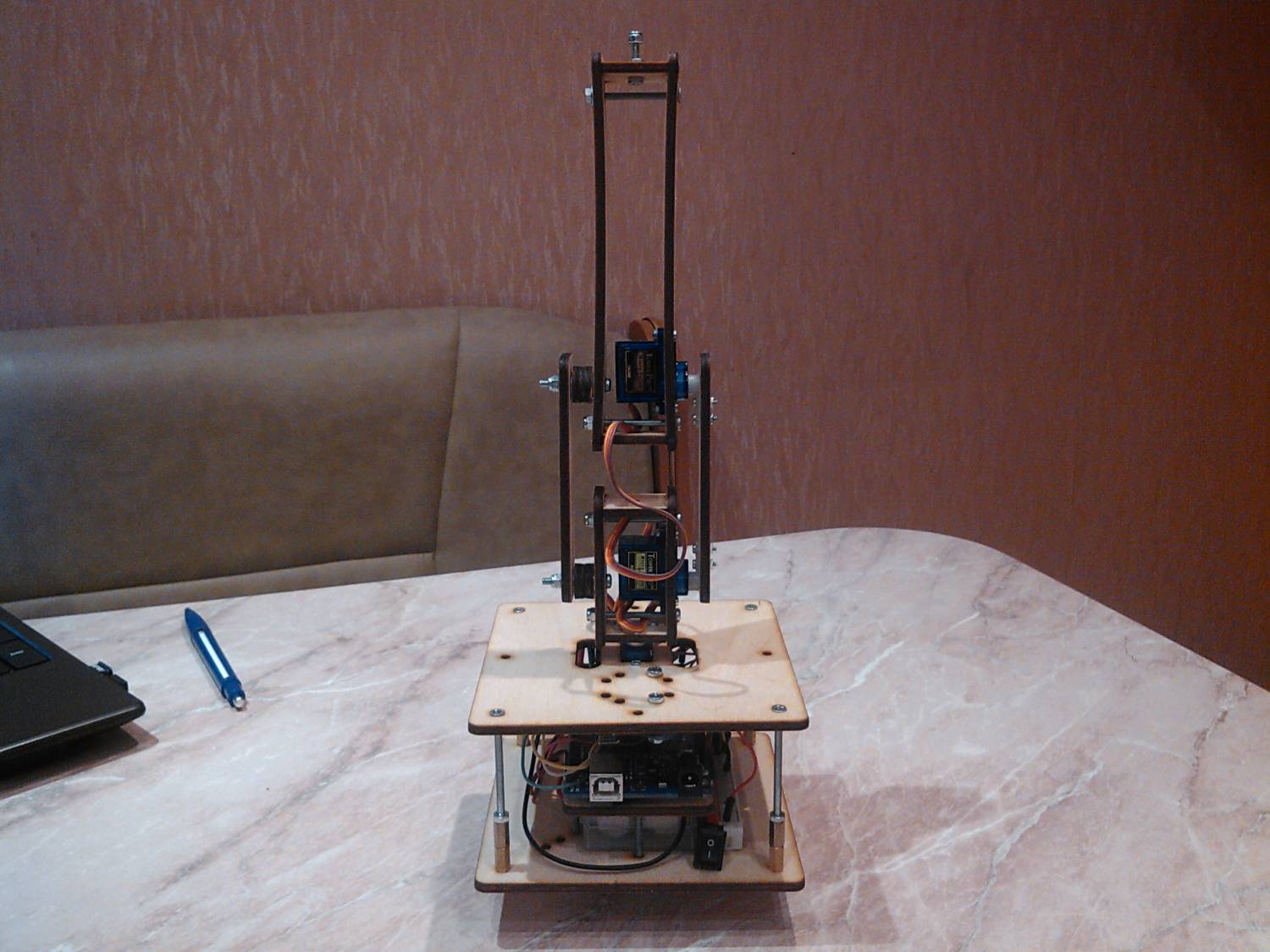 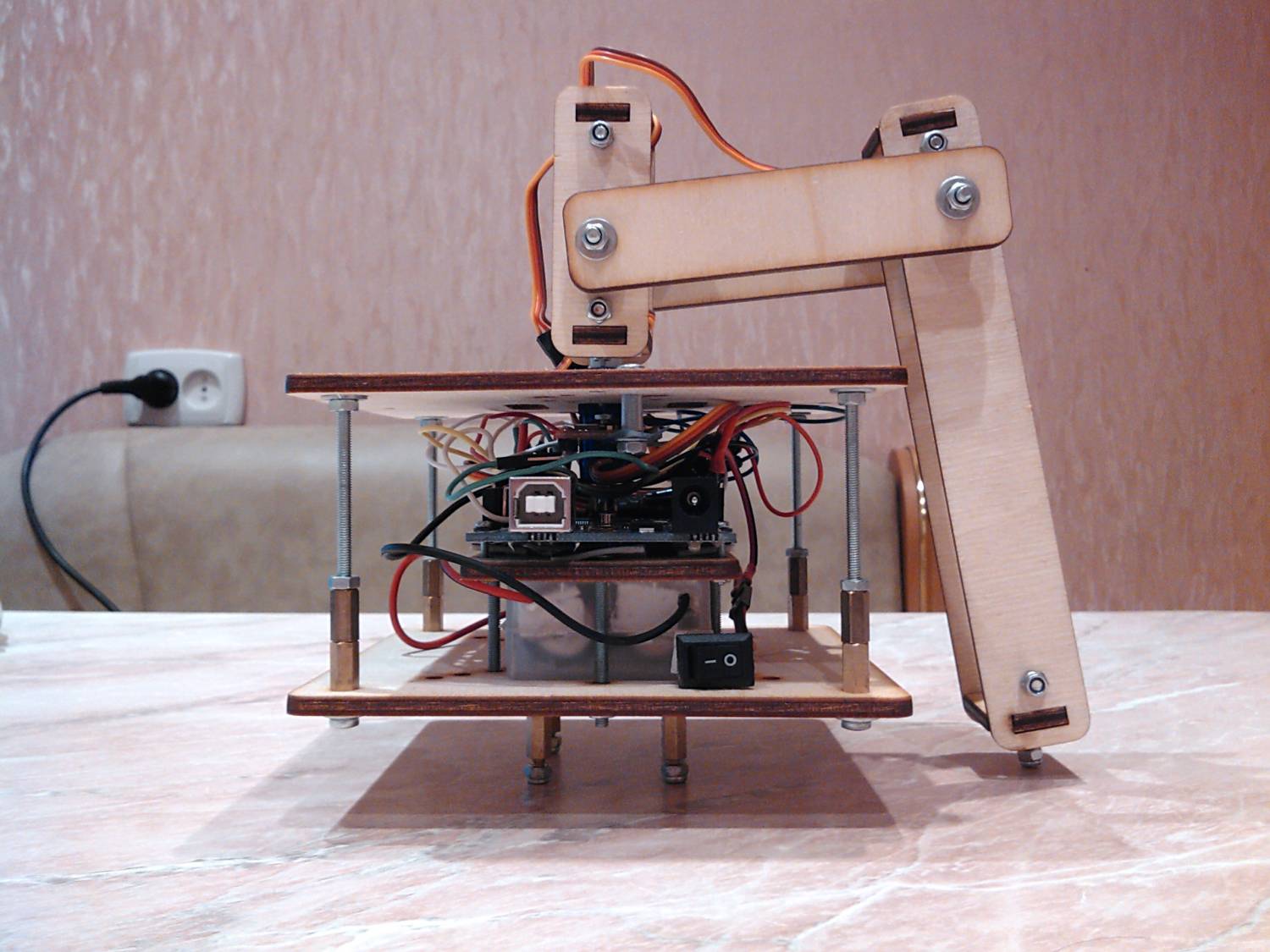  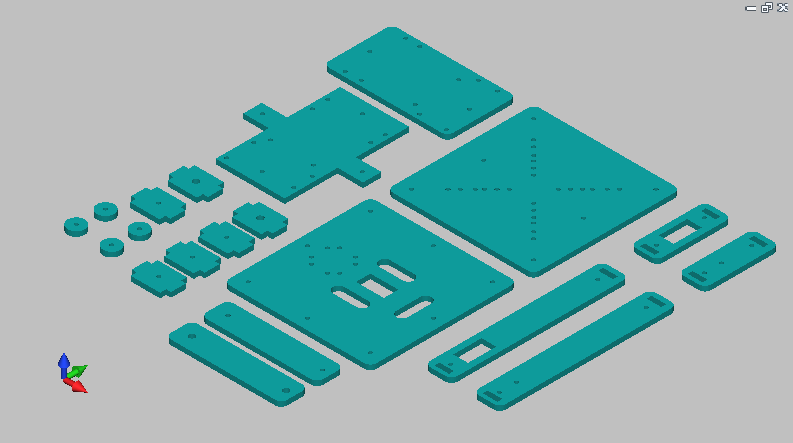 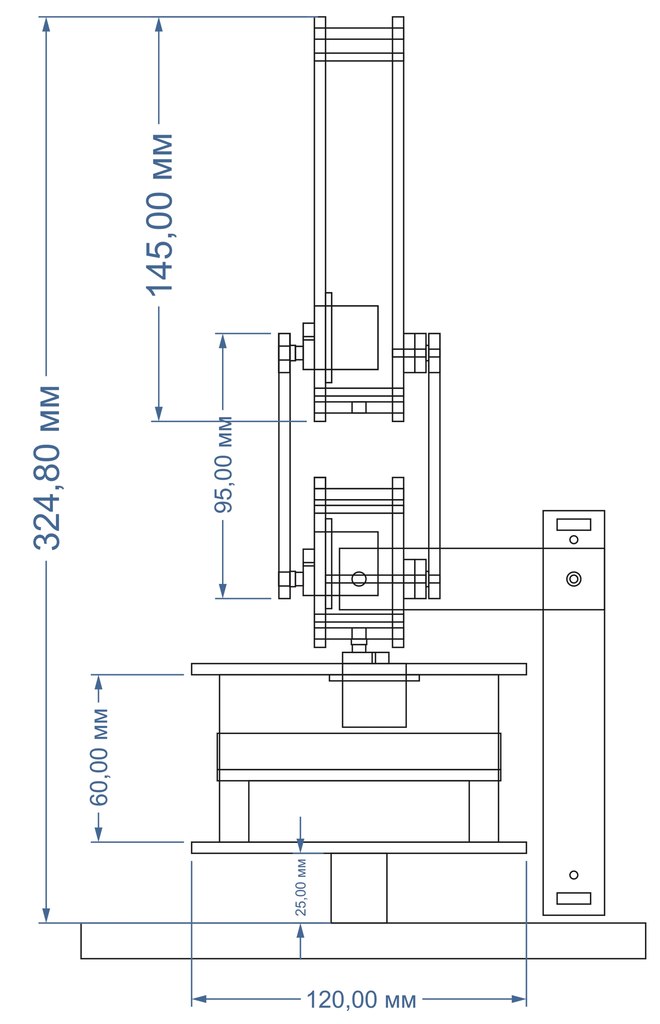 Устройство RoboTumbler: Корпус и части манипулятора вырезаны лазером из фанеры 4 мм. Высота робота на опорах 325 мм, ширина 120 мм. В корпусе закреплены элементы питания, плата Arduino Mega, модуль 10 DOF, сервопривод поворота манипулятора. Манипулятор состоит из нескольких подвижных частей, основание манипулятора закреплено на сервоприводе. На этом видео можно посмотреть как устроен робот. Принцип работы RoboTumbler: Arduino считывает показатели акселерометра (pitch, roll). Если показания превышают указанный градус, манипулятор направляется в сторону уклона. Отталкиваясь от поверхности, робот возвращается в горизонтальное положение. Таким образом, робот автоматически встает после падения. Если робот находится на неровной поверхности и не может встать. После пяти неудачных попыток или невозвращении в горизонтальное положение, он старается сместиться. Смещение происходит за счет инерции от рывка манипулятором. Такой способ передвижения конечно не идеален, его использование связано со слабыми сервоприводами. По идее, робот должен был перекатываться, поворачивая корпус манипулятором. Но сервоприводам TowerPro SG90 такая работа не под силу. Использовал эти сервы потому, что они были у меня под рукой. На видео показаны все возможности RoboTumbler. Файлы проекта: RoboTumbler_v01_ino.zip - архив с файлом кода для Arduino. Код основан на готовом коде для 6DOF. Состоит из нескольких файлов, запускать RoboTumbler_v01. RoboTumbler_v16_cdr.zip - архив с файлом чертежей для CorelDraw x6. Сохранено для версии 16.0. В чертежах учтены допуски в 0,2 мм. (толщина реза лазера). Например, отверстие 3 мм, будет 2,8 мм. Добавлено 16.022016: RoboTumbler3D.stl - STL файл для 3D печати частей корпуса робота. Автор STL файла, Евгений Токарев. Это может быть вам интересно: |
| Всего комментариев: 14 | |
|
| |





 Забавная штука))
Забавная штука))