






Ищите меня тут
![]()
![]()
![]()
![]()
Мы на Android


Последние записи
Записи на форуме
Случайная картинка

Случайное видео
Статистика
Онлайн всего: 1
Гостей: 1
Пользователей: 0
Главная » 2013 Ноябрь 13 » RoboTrooper начало проекта и планы
|
RoboTrooper начало проекта и планы
Проекты | 13.11.2013 в 00:04 | от: ZSeregaA | Просмотров:
 33226 |
Комментариев: 33226 |
Комментариев:  12 |
Рейтинг: 12 |
Рейтинг:  5.0 / 5 5.0 / 5
|
|
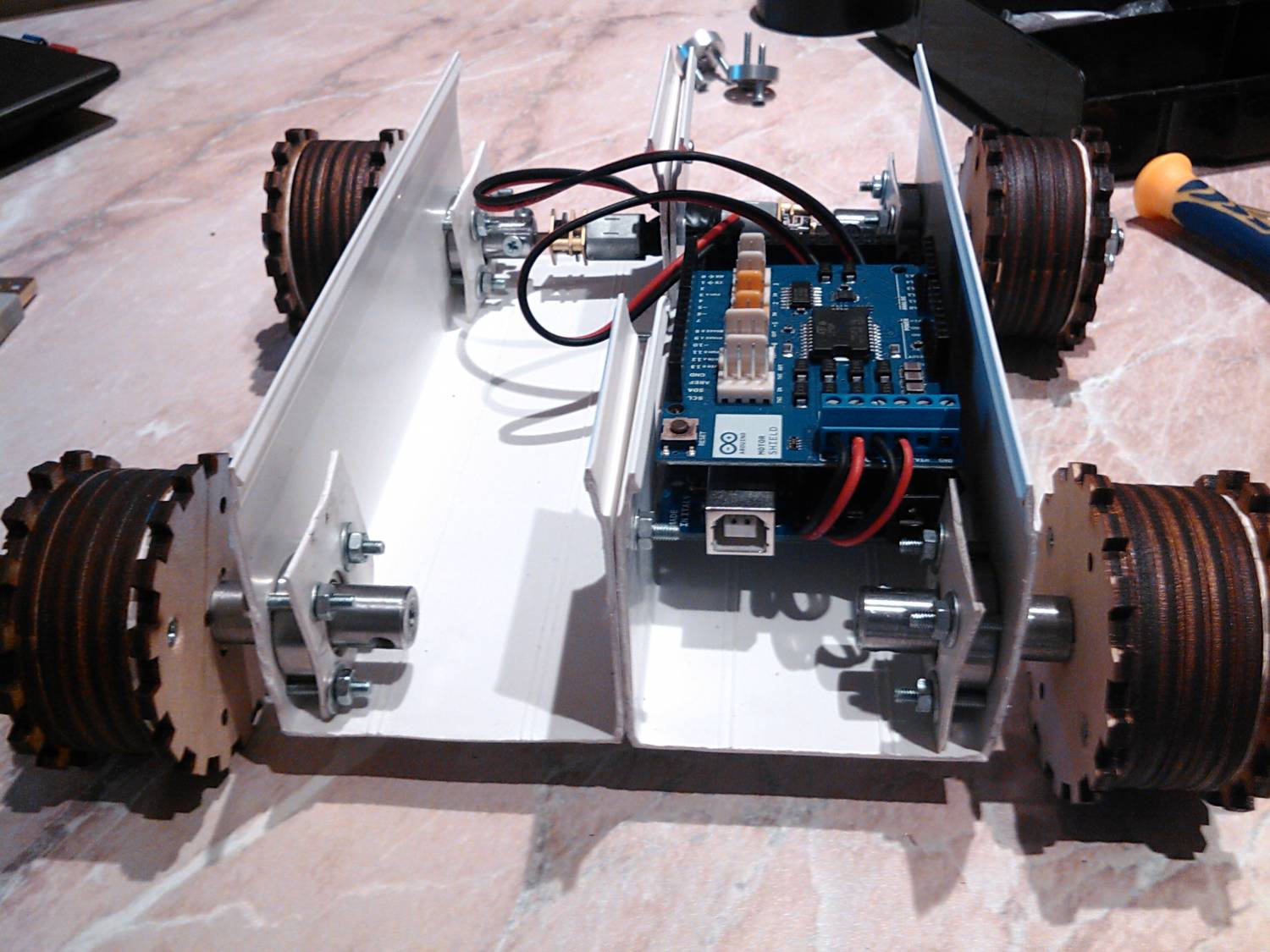
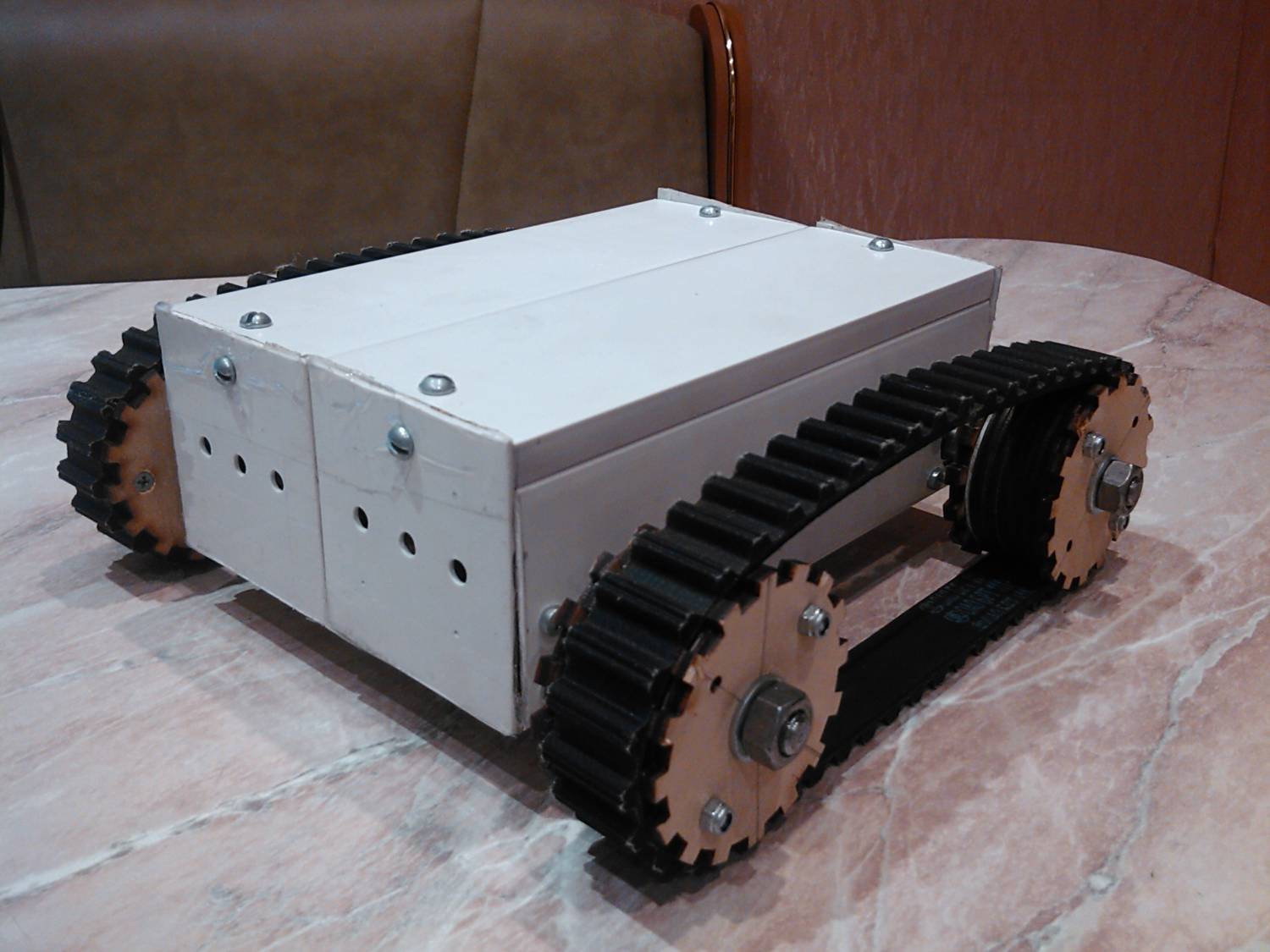
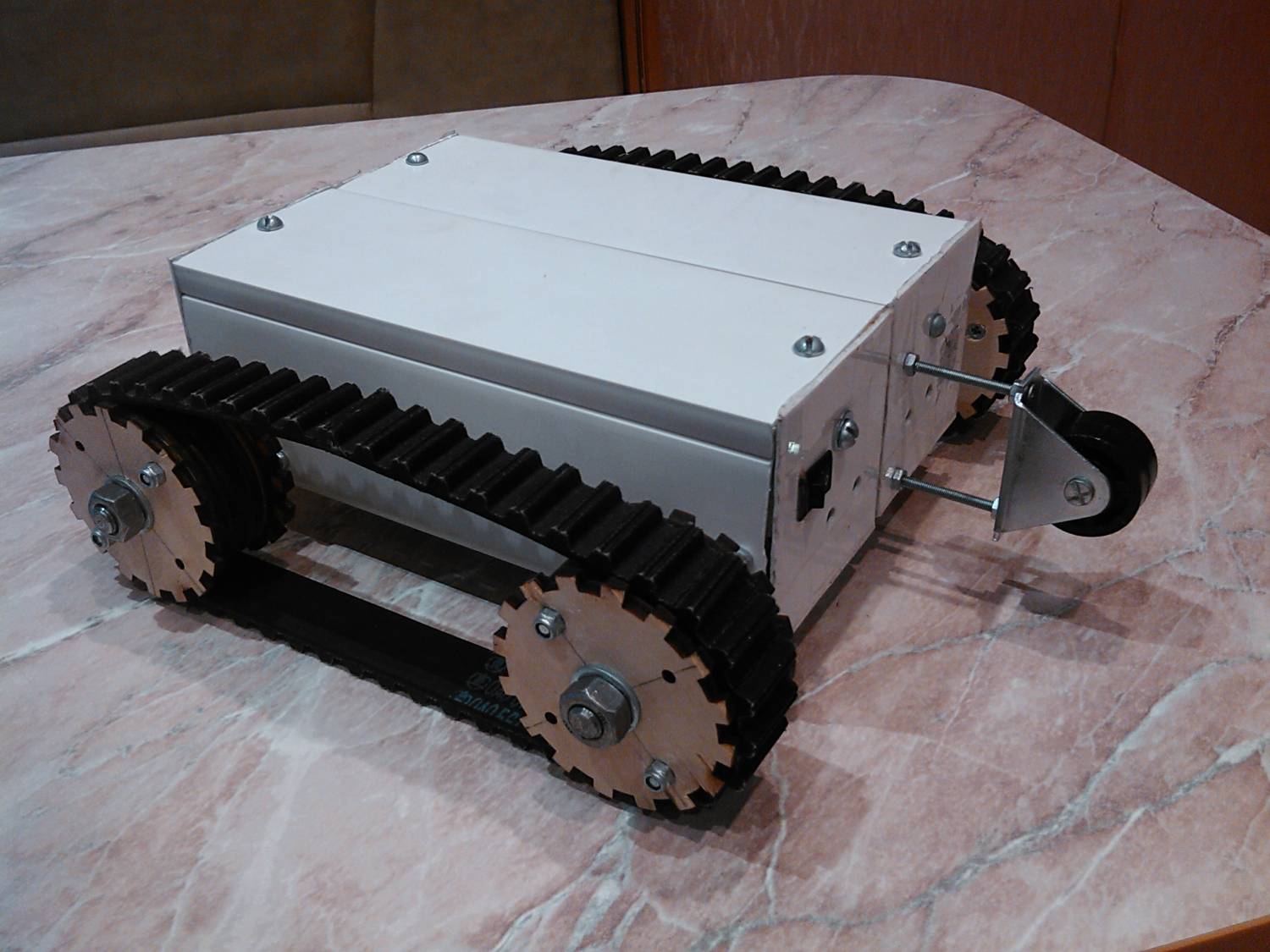
RoboTrooper – это гусеничная платформа на основе Arduino Mega. Данную платформу придумал и создал в качестве прототипа, с помощью которого хотел выяснить её возможности. Гусеничную базу хотел использовать в более сложном и интересном проекте. RoboTrooper оправдал мои ожидания.
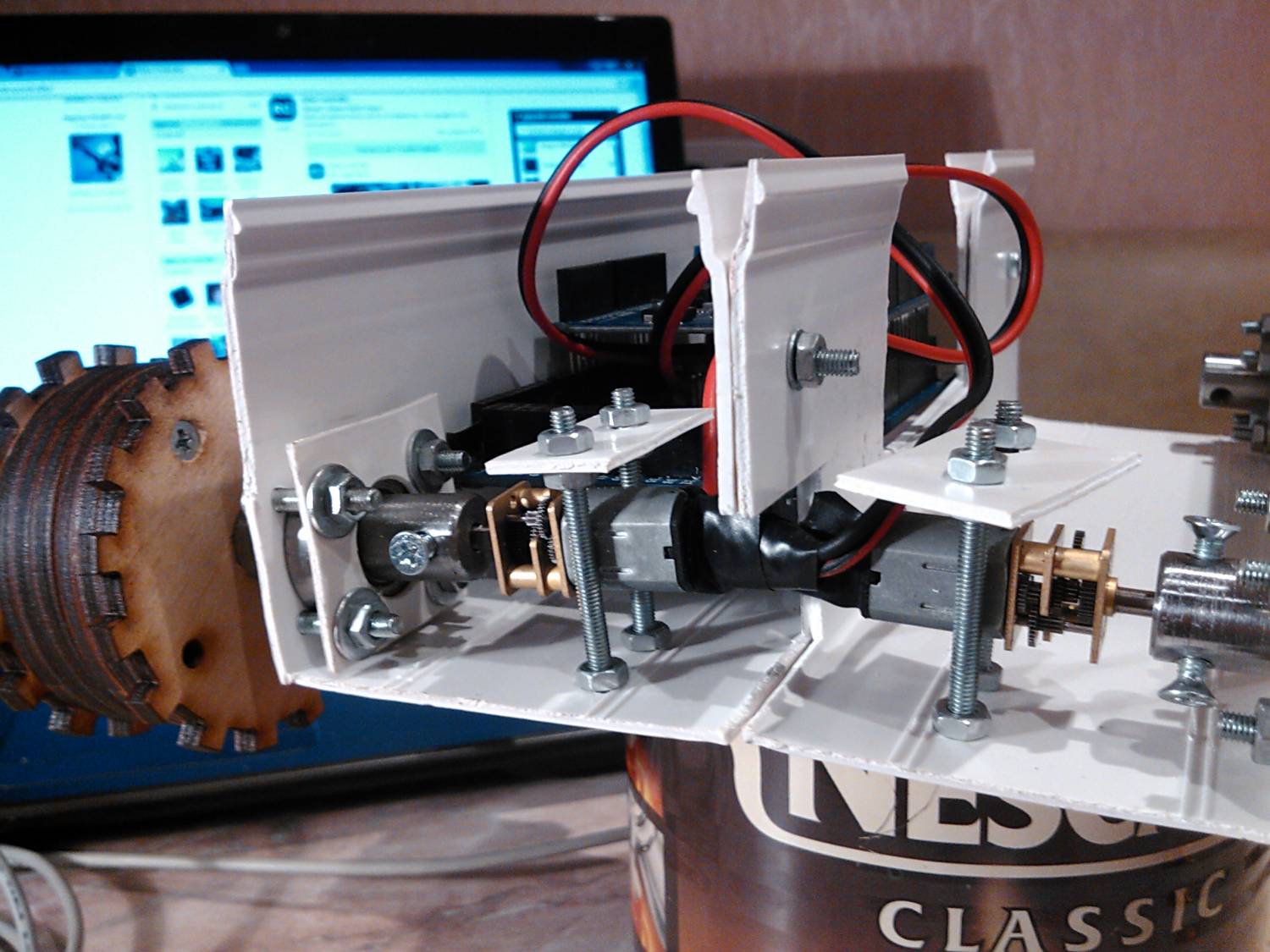
Корпус у прототипа RoboTrooper состоит из двух половин сделанных из кабель-канала 60x60. Ролики вырезаны лазером из фанеры 4мм. В качестве гусениц использовал ремень ГРМ от вазовской десятки. Валы, на которых закреплены ролики, выточены из металла. Возможно они чересчур мощные для данной конструкции, но мельчить не хотелось. Так как это усложнило бы работу токаря. Моторы крепятся к ведущим валам. Как это всё устроено смотрите на фото. 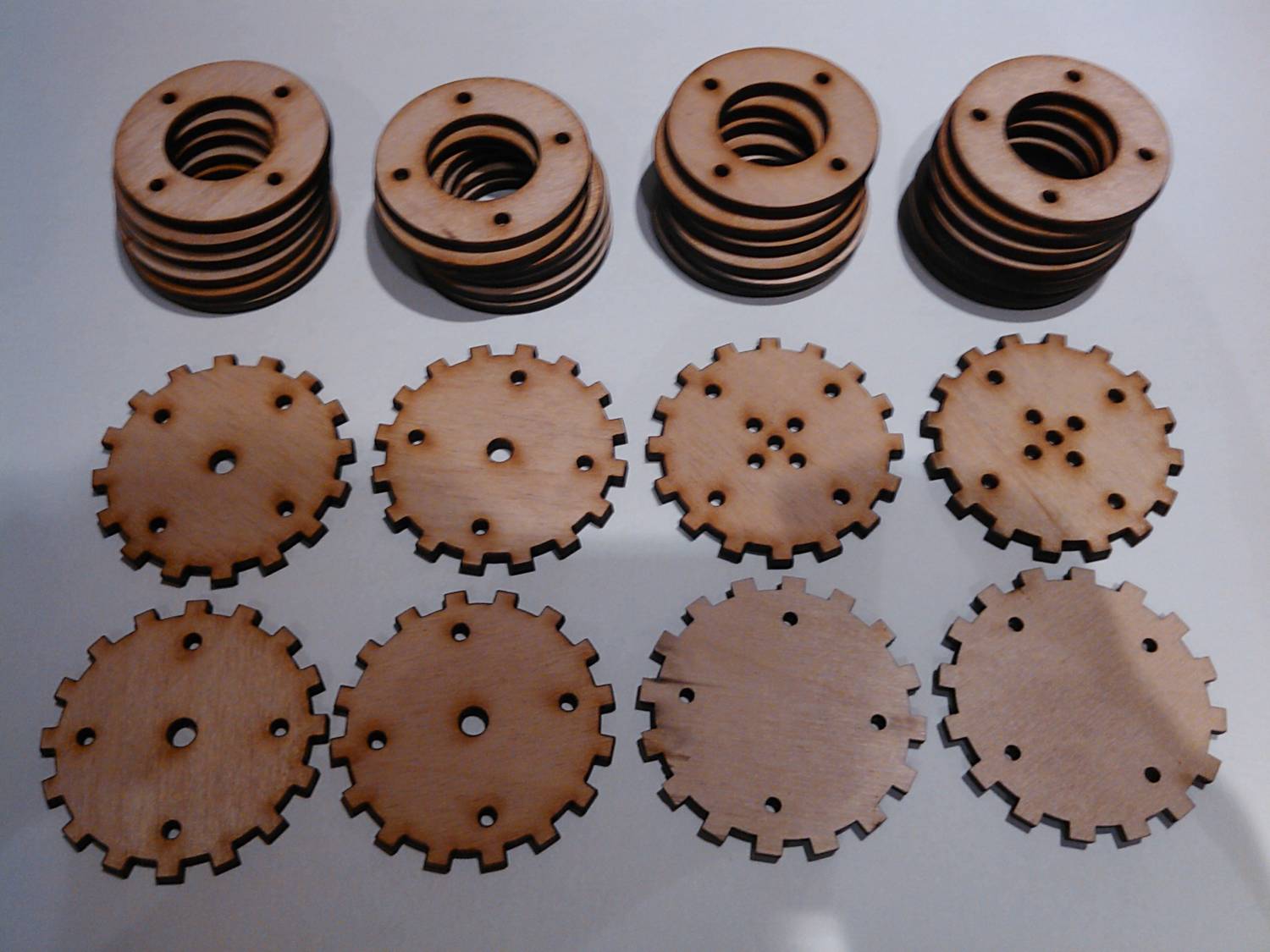 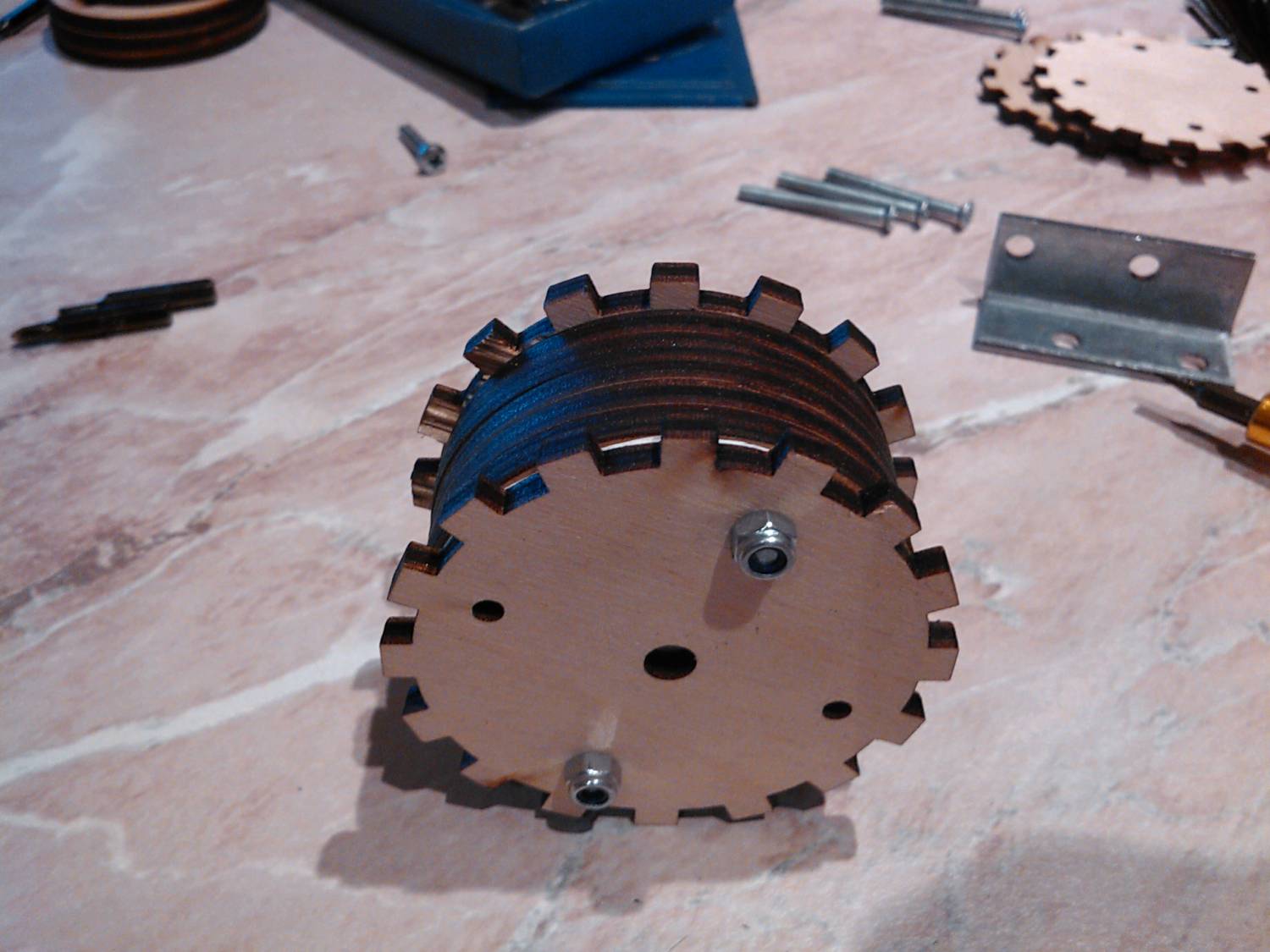 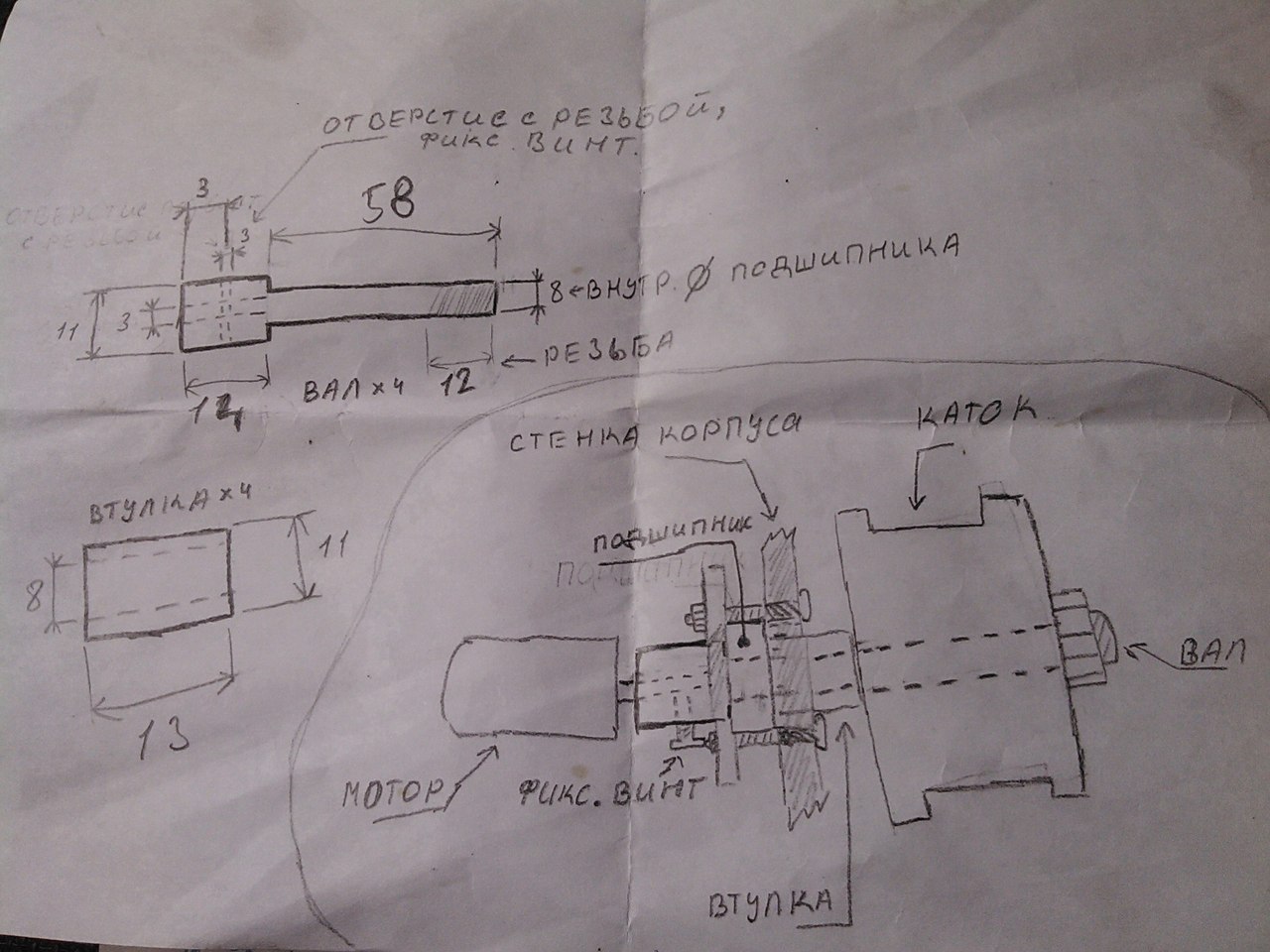
  
Что из этого получилось, смотрите на видео Планы по использованию RoboTrooper В ближайшее время начну эксперимент по созданию алгоритма автономного передвижения платформы. Звучит конечно громко, но суть и реализация мне кажется не сложной. Для этого хочу использовать лежащий мертвым грузом 10DOF модуль. Возможно добавлю дальномеры. Вот как я себе это представляю: Используя 10DOF модуль, можно отслеживать положения объекта в пространстве. Условная местность, по которой будет передвигаться платформа, не ровная. При движении «в слепую», существует возможность опрокидывания платформы. Для исключения подобных ситуаций, будут установлены придельные углы крена на каждую сторону. При достижении придельного угла, платформа принимает решение по изменению направления движения. Решение будет приниматься с учетом текущего положения платформы. Демонстрация работы 10DOF модуля: Результаты будут опубликованы на сайте. Читайте мою страничку Вконтакте, там я буду делиться промежуточными результатами экспериментов. Это может быть вам интересно: |
| Всего комментариев: 12 | |

| |
